Les origines du mal
Tout le monde se pose un jour mais quel est donc le meilleur firmware pour vol FPV ? les avis divergent, et pourquoi les avis divergent ? parce que personne n’est d’accord dans le FPV ! 🤫
- C’est Beta le meilleur !
- Arrête, c’est clairement Cleanflight et Emuflight.
- Mais flightone et falcox sont tellement mieux
- Vous dites ça parce que vous n’avez jamais essayer Kiss
Bref, c’est le genre de conversation qu’on retrouve fréquemment sur les groupes FPV lorsque on pose la question, mais alors, quel est le meilleur firmware pour mon contrôleur de vol ??
Je vais tenter de vous accompagner pour faire votre choix, mais je vous préviens tout de suite, ouvrez une bière ça risque d’être long.
Afin de froisser personne, je vais plutôt essayer de vous expliquer pourquoi certains ont choisi tel ou tel micrologiciel, et non pas qu’elle est le meilleur parce qu’il n’y a pas de meilleur firmware , si d’ailleurs tel était le cas on volerait tous en DJI. 😂😂😂
Mais qu’est ce qui attire les usagers vers l’un de ces firmware plutôt qu’un autre? Et pourquoi DJI et son système FPV est encore loin de tout ça ….
BETAFLIGHT
Tous les comparatifs de firmware commencent par BETAFLIGHT et on va pas déroger à la règle, vous comprendrez mieux la suite. Beta est de loin le logiciel le plus populaire de tous les microprogrammes beaucoup d’entre eux sont d’ailleurs tiré d’une verion de betaflight. Malheureusement cette popularité c’est sa force mais aussi sa faiblesse.🤔
Pour info, Il s’agit d’un fork porté par Boris , de Cleanflight, créé par Clifton&Hydra qui est lui même basé sur BaseFlight de Timecop. En gros, ce qu’il faut retenir c’est que dans le FPV a chaque fois que les développeurs s’engueulent, ils créent un fork 😂😂
1er avantage et pas des moindre, il fonctionne sur une très large variété de matériel. Du très haut de gamme de bonne facture, jusqu’à l’ultra bon marché (ndlr: bon marché qui va probablement fumer à la minute où vous l’aurez branché). Ce qui signifie que quelque soit votre niveau d’exigence et vos moyens financiers, vous pourrez trouver du matériel qui vous convient. Mais ça signifie également que vous n’êtes pas garanti d’une bonne expérience juste parce que vous achetez du matériel compatible betaflight.
La popularité de ce firmware fait qu’il dispose d’une énorme communauté de personnes qui créent de la documentation et des tutoriels. Cela signifie aussi que quelle que soit votre question il y a probablement plusieurs tutoriels qui traite le sujet. Paradoxalement, cette large communauté, peut aussi être un inconvénient car il y a tout un tas de gens inutiles qui pullulent et communiquent des réponses erronées aux questions. (et sans parler des trolls)
A contrario, lorsque vous posez une question sur certains micrologiciel moins populaire, vous risquez d’obtenir aucune réponse ça vous permettre de vous faire votre propre opinion.
Les PID de BETAFLIGHT peuvent être modifiés et réglés d’un grand nombre de façons différentes et cela signifie que à peu près tout ce que vous voulez que betaflight fasse vous pouvez probablement le faire. Vous devriez pouvoir obtenir le genre de sensation que vous voulez, que vous fassiez du freestyle ou de la cinematique, que vous voliez avec un gros quad, ou un cinewhoop. Ce qui ressort de tout ça, c’est que très peu de gens semblent satisfait par le tune par défaut de betaflight….
Lorsque on compare beta avec les autres logiciels de contrôleur de vol, il y a toujours quelqu’un qui dit « oh mon dieu il faut absolument que tu testes ça, c’est si bon !!! ça vole si bien et vous ne semblez pas en voir autant avec Betaflight, surtout compte tenu de son énorme popularité.
Betaflight c’est en quelque sorte le micrologiciel par défaut avec lequel tout le monde commence et puis les gens qui sont heureux pensent que c’est le meilleur et les gens qui sont lasse ou pas satisfait qui vont voir ailleurs et font « oh….c’est tellement mieux ».
Les développeurs de betaflight savent combien leur firmware est populaire et combien de débutants vont l’utiliser. Ils ont en quelque sorte dilué un petit peu les commandes et arrondis les angles, juste pour être sûr que tout le monde soit satisfait. Il préfère une bonne expérience partielle que faire des mécontents.
Si on regarde simplement le réglage des pid de betaflight :
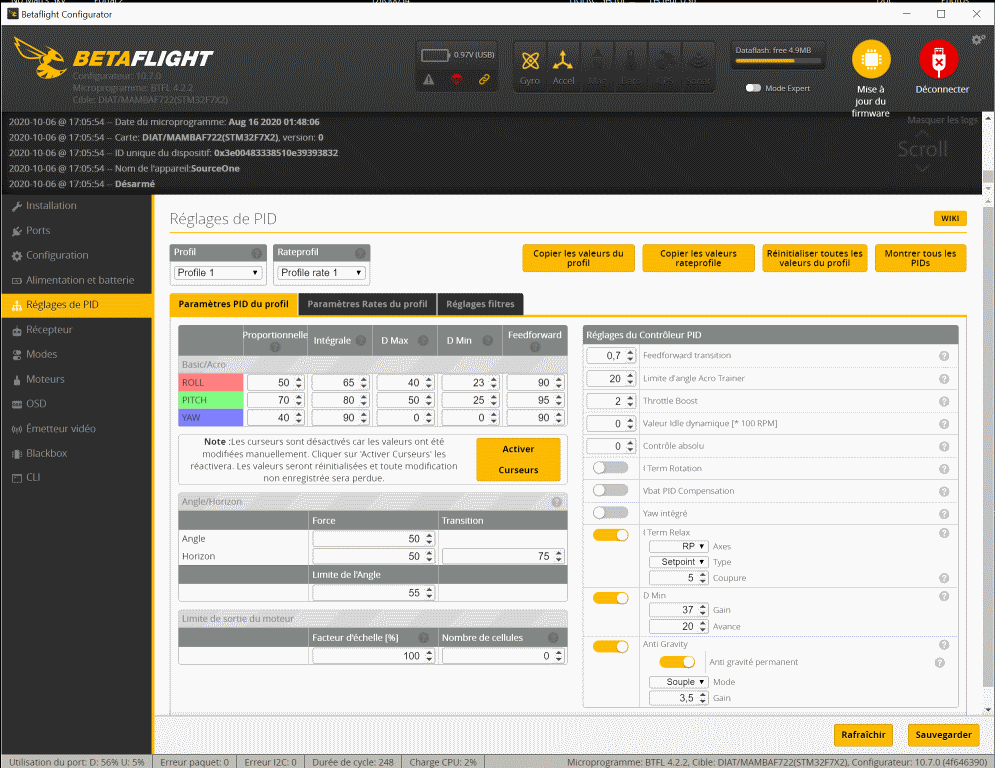
On s’aperçoit immédiatement qu’on peut vite être dépassé par les événements:
– c’est quoi le feedforward ? il faut l’activer ou non? que dois-je faire pour le régler ?
il y a tellement d’options ici et il y en a encore plus ailleurs surtout si vous utilisez des commandes dans le CLI, que les néophytes peuvent être effrayés dès le départ.
Le rythme de développement de betaflight est extrêmement rapide, les développeurs sont toujours prêt a ajouter des nouveautés pour que le quad vole mieux et cela conduit certaines personnes à se sentir vraiment dépassées pas seulement par le nombre d’options et de boutons qui peuvent être réglés mais aussi par le rythme du développement.
Betaflight ne fait des mises a jour majeur que deux fois par an et pourtant à chaque fois qu’il sort, certaines personnes pensent que tellement de choses ont changé qu’ils doivent tout réapprendre.
Encore une fois, certaines personnes comme moi, trouvent ça vraiment excitant, et d’autres trouvent cela effrayant et accablant et veulent « juste » voler avec leur putain de quad !
Maintenant betaflight est un projet open source que n’importe qui peut regarder le développement en temps réel, il suffit d’aller sur le github et si vous regardez les issues ou les pull requests vous pouvez littéralement regarder les développeurs se parler des changements avenir dans le code et ça c’est cool.
Le github permet également de satisfaire la curiosité de certains d’entre nous qui veulent juste voir derrière le rideau de quel façon le développement se déroule. D’où proviennent ces nouvelles fonctionnalités. Pourquoi elles sont ajoutées. Qu’elles sont les intentions des développeurs….
Effectivement si tu veux juste voler en quad, tout ça est un peu ‘too much’ pour toi, mais sache que ça existe.
Les développeurs de betaflight sont très concentrés sur les données et les résultats et non sur le ressenti des pilotes, en d’autres termes, les développeurs regardent toujours les data d’enregistrement du quadcoptère pour essayer de voir objectivement ce qui rend le drone plus précis en fonction des commandes que le pilote lui envoie.
Si quelqu’un dit : « Je pense juste que c’est mieux, j’aime cette sensation ».
ils ne semblent pas y prêter beaucoup d’attention.
Ce point là semble être l’un des principaux facteurs de discorde.
Il y a ceux qui disent: montrez-moi les données et d’autres qui disent je ne peux pas vous les montrer mais regardez il vole mieux avec cet autre firmware, c’est subjectif…
▂▃▄▅▆▇█▓▒░NEXT░▒▓█▇▆▅▄▃▂
CLEANFLIGHT
Le prochain que nous devons examiner est Cleanflight qui d’ailleurs a bien failli ne jamais figurer dans cette liste. Cleanflight est en quelque sorte le père de betaflight, béta étant un fork de celui-ci. Beta est devenu au fil des années beaucoup plus populaire que son ainé et l’a éclipsé. Très vite cleanflight est devenu obsolète, jusqu’à la sortie de la V2.
CleanFlight version 2.0 est redevenu betaflight mais avec un logo vert au lieu d’un logo jaune et à cet égard cleanflight n’est pas vraiment intéressant
Au départ, il y avait quelques différences avec beta mais en gros trop peu de personnes l’utilisaient et récemment
le principal développeur de cleanflight clifton c’est séparé du projet de manière définitive en raison de certaines tension entre les développeurs. Ne maitrisant pas forcément le sujet, je ne m’étendrais pas plus….
¸.·´¯·.´¯·.¸¸.·´¯`·.¸><(((º>

KISS
le prochain sur la liste est kiss qui a été créé dans le but, à l’époque, de rendre plus facile pour les néophytes: de construire et de faire voler un quad. (Kiss et flyduino semble provenir de multiwii).
Les développeurs de KISS se sont penchés sur CLEANFLIGHT à l’époque où BETAFLIGHT n’existait pas encore et ils l’ont regardé grandir il était si compliqué à mettre en place qu’il se sont dit qu’ils allaient se débarrasser de tout ça:
« Nous allons faire un firmware qui vole et qui est simple à mettre en place » et dans un certain sens kiss est à la hauteur de son exigence de départ.
Quand on regarde le configurateur KISS il y est simple, il y a moins d’options, moins de choses pour vous submerger mais le revers de la médaille c’est que la simplicité a un prix et à certains égards, il est moins performant que certains autres firmwares.
Effectivement il possède toutes les fonctions de base que tout le monde veut et il vole bien, il n’y a pas à se plaindre. Mais il y a quelques fonctionnalités qui font défaut et que kiss n’a pas parce que leur but n’est pas de le faire.
On entend souvent les gens dirent que kiss possède l’une des meilleures stick feeling pour le freestyle ou la race, mais encore une fois c’est difficile à quantifier et d’une personne à l’autre, c’est trop subjectif.
Les utilisateurs de KISS ont surtout l’impression que le réglage par défaut des PID vole bien et qu’il n’est pas nécessaire d’en changer.
La façon dont KISS gère le matériel est différente de celle de betaflight ou de cleanflight. le matériel kiss est propriétaire et uniquement fabriqué par kiss. Le patron de kiss a maintenant une nouvelle société appelée fettech mais en gros c’est la même chose. Ils ne font pas de sous-traitance, ils construisent leurs propres cartes et il n’y a pas de sous-traitant qui fournit des contrôleurs de vol compatible.
Du coup si vous achetez du matériel KISS vous savez que vous l’obtenez de la même société qui fait le firmware. Je pense que la plupart des gens savent que KISS fournit une électronique de très bonne qualité, malgré quelques déboire par le passé où les ESC s’enflammaient, mais pour l’heure tout est résolu.
Je pense que la qualité du matériel KISS est plus élevée que des fabricants lambda de carte. C’est un peu comme le haut de gamme de BETAFLIGHT sans le bas de gamme, bon marché.
Le revers de la médaille c’est que l’ensemble est plus cher et qu’il n’y a pas d’option bon marché. Si vous décidez d’opter pour Kiss, il faut avoir en tête qu’il vous faudra le billet d’entré.
Un autre aspect de Kiss qui peut être un peu frustrant est qu’il dispose d’outils limités pour le dépannag,e quand les choses tourne mal avec betaflight vous pouvez vous plonger dans le CLI et obtenir toutes les informations qu’il est possible d’avoir.
Je pense qu’on peut dire qu’avec KISS quand les choses fonctionnent bien tout roule (ou tout vole) mais quand elles ne fonctionnent pas vraiment parfois ça peut vite tourner au cauchemar. Ça s’applique autant aux dépannages, qu’aux réglages des PID.
Oui, le contrôleur PID de KISS est intentionnellement très simple, il n’y a que quelques boutons et de cadrans à bouger mais si vous avez un problème qui n’est pas facile à résoudre avec ces quelques boutons, et bien dans betaflight il y a probablement 17 autres avec lesquels vous pouvez jouer pour essayer de trouver comment le résoudre.
Sachez qu’au cas où vous vous heurteriez à un mur, vous risquez d’être coincé.
Enfin dernier point noir c’est que les cartes KISS ne dispose pas d’OSD intégré, celui-ci est séparé de la carte, et il faudra le câblé.
¯¯̿̿¯̿̿’̿̿̿̿̿̿̿’̿̿’̿̿̿̿̿’̿̿̿)͇̿̿)̿̿̿̿ ‘̿̿̿̿̿̿\̵͇̿̿=(•̪̀●́)=o/̵͇̿̿/’̿̿ ̿ ̿̿
FLIGHTONE
Ensuite vient la dernière variante de flightone appelé falcoX
Falcox se distingue des autres firmware car il est entièrement configurable depuis l’affichage à l’écran (OSD) pas forcément besoin d’un PC. Lorsque vous commandez une carte FLIGHTONE, elle vous arrive avec le firmware déjà pré-installé. Vous le connectez en suivant les instructions afficher dans les lunettes et ensuite l’ensemble se paramètre directement dans l’afficheur. C’est une grande prouesse parce que c’est l’installation la plus facile de tous les logiciels FPV.
Si vous avez déjà utilisé un simulateur, c’est la même chose, quand vous le démarrez pour la première fois, ils font bouger les sticks en cercles 2s, maintenir les gaz, appuyer sur les inter. Voilà maintenant vous n’avez plus besoin de faire aucune des opérations manuel de mappage des canaux, ni les end-point et autres modes auxiliaires.
Toutes ces choses que vous faites manuellement habituellement dans betaflight et aussi dans kiss v2 même si c’est un peu plus simple c’est fait automatiquement dans falcox.
Mais flightone c’est cool avec un stick feeling d’enfer, falcox a beaucoup plus à offrir que l’installation facile et le fait de ne pas avoir besoin d’un ordinateur pour l’installer.
De nombreuses personnes affirment que Flight1 est bien meilleur que les autres firmware, beaucoup de RACER semblent l’apprécier, et il y a beaucoup d’éminents pilotes de freestyle qui utilisent le falcox. Il a vraiment fait un un coup d’éclat sur la scène des courses et beaucoup de coureur soutiennent que FlightOne et Falcox les rendent plus rapides.
Mais comme toujours, beaucoup de coureurs importants préfèrent encore une fois Betaflight parce qu’ils pensent qu’ils peuvent le régler pour en tirer plus de performances et parfaitement l’adapter à la machine.
Flightone bénéficie de son savoir faire, grâce au développement de Falcox, notamment sur ses valeurs par défaut. Je pense que c’est un vraiment très bon firmware pas trop open-source mais un bon logiciel malgré tout.
Comme avec KISS presque tous les contrôleurs de vol qui utilisent flightone sont fabriqués par Flight1.
Contrairement à betaflight seule quelques cartes sont compatible. FlightOne fabrique ses propres contrôleurs de vol avec deux formats différents: un de 30 millimètres. et un autre de 20 millimètres.
Un des inconvénients de cette situation est qu’il fréquemment en rupture de stock, et que son prix est plus élevé 🤑 que les autres FC.
si votre contrôleur de vol betaflight préféré préféré est en rupture de stock, vous pourrez probablement trouver quelque chose d’autre à utiliser si vous voulez juste prendre l’air. ce n’est pas le cas avec flight one et…
en faite, il y a eu quelques très longues périodes de sécheresse et ca va pas en s’arrangeant. Pas mal de personnes ont juste abandonné le projet parce que la carte n’arrivait pas.
Il est a noté que cette carte nécessite un montage irréprochable, autant mécaniquement qu’électriquement.
Avant l’arriver des dernières H7, les problèmes de ces cartes se situés au niveau du filtrage, qui pénalisé le gyroscope du contrôleur. Les effets de la présence de bruit se manifestaient par un échauffement anormal des moteurs.
Visiblement après l’ajout de condensateurs de filtrage plus de soucis, d’ailleurs Damien Gans conseil d’en mettre le plus possible.
parce qu’ils ne pouvaient pas parce qu’ils n’arrivaient pas à avoir du matériel pour Flight One. essaie d’obtenir le meilleur vol possible performances de vol des quads et certaines personnes ont mentionné qu’ils avaient plus de problèmes avec des moteurs chauds ou des bruits excessifs de gyroscope sur le vol 1 par rapport à certains des autres firmwares beaucoup de gens pour beaucoup de gens il vole super mais si vous avez un gyroscope, votre gyroscope sur votre contrôleur de vol n’est pas tout à fait au point ou si votre construction n’est pas tout à fait au point. si vous n’êtes pas juste si vous avez un bâclage construction vous pouvez rencontrer des problèmes avec des moteurs chauds
ou d’autres problèmes de bruit de gyroscope
https://youtu.be/13hto0DtTGM
║▌║█║▌│║▌║▌█
EMUFLIGHT
Ensuite vient, EmuFlight qui est un fork de butterfly qui lui même un fork de betaflight 3.3
butter fly est née d’une scission avec les développeur de raceflight concernant le filtre kallman
Il y a eu quelques tension concernant la meilleure façon de réaliser le filtrage. Sans entrer dans d’énormes détails techniques sur ce que emu flight pense être différent de betaflight.
Emuflight fonctionne également sur tout matériel betaflight
Beaucoup de gens passent à emuflight lorsqu’ils ont rencontré des problèmes avec betaflight et qu’il y a quelque chose dans Betaflight qu’ils n’aiment pas. EmuFlight a une communauté de développeurs très dévoués bien que peu de développeurs travaillent de façon artisanale. La communauté est très dévouée et très connectée avec leur base d’utilisateurs. Une des choses que les gens disent aimer à propos de emuflight c’est la convialité de la communauté
Très souvent, si vous avez une idée que vous aimeriez pouvoir faire dans Betaflight, beta semble ne pas porter beaucoup d’importance a ce genre de retour et préfére faire comme ils l’entendent, avec leurs propres idées. Mais les développeurs d’E.M.U. et c’est là qu’on s’aperçoit que le projet est plus petit sont beaucoup plus susceptibles de de dire « oh, c’est une bonne idée ».
Emu apporte des petites fonctionnalités spécifiques au tinywhoop, le comportement des petits drones sont différentes des gros et il dispose de caractéristiques intéressantes pour ce type de vols.
Finalement le seul inconvénient je dirais c’est cette petite base de développeurs qui se concentre sur le développement dans domaines relativement limités. ils ne sont pas pour créer de nouvelles fonctionnalités révolutionnaires comme le FAiLSAFE par GPS et le retour à la maison (return to home) ils se concentrent sur de très petits domaines et en ajoutant de petites fonctions spécifiques pour adapter l’expérience de vol de manière spécifique en outre, ils disposent d’une base de test il y a moins de pilotes qui le pilotent et… donc le code peut ne pas être testé aussi minutieusement et il peut être plus probable que des bugs se faufilent simplement parce qu’il y a moins de développeurs qui examinent le code. Il y a une manière moins structurée de développer le code et il y a simplement moins de pilotes de test en général c’est une hypothèse mais ça ne serait pas la première fois qu’un bug ait été introduit par un petit développeur dans un logiciel de contrôle de vol et quand quand ça tourne mal ça peut tourner mal donc je j’ai l’impression que ça mérite d’être mentionné.
https://youtu.be/Y3X-If9KM_I?t=417
‛¯¯٭٭¯¯(▫▫)¯¯٭٭¯¯’
INAV est encore un FORK de BETAFLIGHT qui emprunte inévitablement beaucoup de ses fonctionnalités. Visiblement le monde de l’OPEN SOURCE FPV est une succession de divorces qui donne naissance a tout plein de projet varié.
INAV se concentre sur le vol autonome des aéronefs à voilure fixe et tournante, en d’autres termes il va améliorer Betaflight sur sa la capacité à faire voler son drone grâce aux capteurs embarqués: GPS – BARO – CAPTEUR DE FLUX OPTIQUE, etc. C’est un programme type DJI FPV, avec des types de vol similaire et surtout la possibilité de faire des vols automatisés grâce a des waypoints, avec des fonctions comme retour à la maison (Return To Home, RTH).
D’ailleurs si pour des questions d’éthique (sic) vous ne souhaitiez pas opter pour du système DJI FPV, vous devriez vous intéressez de plus prêt à ce projet.
Finalement INAV essai de développer un projet identique a Ardupilot avec une électronique qui initialement n’est pas prévue pour. On peut noter qu’il y a 50 waypoint max de mémoire pour Inav, alors que sur Ardupilot c’est plutôt de l’ordre de plusieurs milliers.
However, when creating a flight plan in Mission Planner for a Rover (boat), particularly the corridor option, the typical mission has around 3,000 – 4,000 waypoints. Three of these missions are typically carried out in a single day if weather permits.
discuss.ardupilot.org
L’avantage d’inav est qu’il fonctionne sur le même matériel qui fait tourner betaflight cleanflight et emuflight. Néanmoins tous les contrôleurs de vol betaflight ne conviendront pas car il nécessite l’emploi d’un baromètre et d’une boussole et éventuellement d’un GPS, mais ce qu’il faut retenir c’est qu’avec inav vous avez un large choix en carte de vol.
D’ailleurs si l’expérience avec inav venait à tourné au vinaigre, vous pouvez toujours faire machine arrière et mettre dessus betaflight / cleanflight ou emuflight contrairement à KISS et FLIGHTONE qui ont leurs matériels verrouillés.
si vous regardez betaflight c’est très concentré sur un un drone de course freestyle de 5 pouces pesant environ 550 à 700 grammes et il fonctionne sur d’autres autres types de quads mais il n’est pas tout à fait aussi optimisé, surtout sur les plus gros drones, vous mettez betaflight sur un grand comme un 10 pouces 18 pouces et il ne va pas ne va pas voler aussi bien sans quelques de sérieux ajustements inevitablement il y a des presets pour ces grands parce que ce sont généralement les plus gros avions qui font ce genre de vol autonome autonome, il supporte aussi différents types de véhicules comme il a un support facile pour les avions à voilure fixe avions betaflight peut être installé sur avions à voilure fixe mais c’est un énorme problème pour le faire fonctionner souvent, il ne fonctionne pas aussi facilement ou aussi bien qu’on pourrait l’espérer avec inav c’est juste intégré et c’est facile à mettre en place inévitablement, ça supporte même les véhicules terrestres comme vous pourriez mettre un contrôleur de vol inab sur une voiture, un camion ou un bateau. Les inconvénients d’inev
L’un des inconvénients est qu’en terme de performances de vol brutes en termes d’accro et de RACE ne sont pas aussi bonnes que d’autre firmware. Si vous êtes un coureur hardcore ou un puriste du freestyle vous allez être déçu par la boucle des PID.
Tout reste encore une fois subjectif car beaucoup de débutants seraient parfaitement heureux de voler avec en mode accro pour du freestyle léger. Maintenant si vous pouviez juste voler en accro freestyle, il suffit de mettre betaflight surtout si vous ne voulez pas des fonctions de GPSdessus mais alors vous n’avez pas de les fonctions gps.
Comme je l’ai évoquer ci-dessus, il n’y a pas tellement de place sur le contrôleur de vol pour stocker des data, donc inévitablement il faut laisser quelque chose de côté pour pouvoir intégrer toutes ces fonctions supplémentaires. Et la seconde raison de l’absence de certaines fonctions, c’est que les développeurs d’inav ont parfois une opinion différente entre eux et les développeurs de betaflight. En gros il pense que les dev. de beta ne sont pas dans le coup et ils décident juste de de le laisser de côté certaines fonctionnalités de pointe comme par exemple le mode tortue.
Pourquoi je ne peux pas retourner mon quad quand il est à l’envers ? quand il est à l’envers, beta everybody
Donnez moi juste le mode tortue, j’aime la navigation.
╚═| ~ ಠ ₒ ಠ ~ |═╝
ARDUPILOT
Ardupilot, c’est un peu mon préféré, et il est peu populaire dans la discipline et est clairement peu orienté FPV, en tous les cas, c’est pas ce qu’il fait mieux. Il fera l’objet d’un article à lui tout seul c’est promis. Mais en attendant pour le décrire, il se rapproche de inav vous l’avez compris, mais en beaucoup mieux. C’est l’un des programmes pionnier apparu avec multiwii. Ardupilot se décline en arducopter, arduplane, ardurover, ardu boat. Le programme est intégrer dans certains drones du marché commercialisés, rappelez vous du 1er concurrent sérieux a DJI. 3D Robotics avec le SOLO.
Pour connaitre l’histoire d’ardupilot et des cartes APM, c’est par là :
https://ardupilot.org/ardupilot/docs/common-history-of-ardupilot.html
ᕕ(˵•̀෴•́˵)ᕗ
CONCLUSION
Si vous êtes déjà dans le FPV, vous avez probablement choisi votre monture que vous préférez, mais pour les gens qui commencent qui débutent, il peut être difficile de savoir lequel choisir.
il semble que l’option la plus sûre serait d’aller vers une FC compatible betaflight cleanflight emuflight qui peut faire fonctionner ces quatre firmware . Ca sous entend que si vous décidiez d’essayer autre chose quelque de différent, vous avez la possibilité de changer.
Il y a certainement un argument convaincant pour flightone et FalcoX qui est facile à mettre en place, sans aucun ordinateur, d’autant plus que tout le monde s’accorde a dire que le stick feeling de falco est très bon. 2 inconvénients a FalcoX c’est que vous allez certainement souffrir du manque de tutoriels bien que la communauté de FlightOne se développe et le peu de disponibilité de ce type de carte.
Concernant KISS mon avis reste mitigé surtout pour des débutants finalement si c’est la simplicité qui vous attire prenez flightone.
il semble quand même de très bon retour que les gens ont trouver leur chemin jusqu’à Kiss et se disent « oh, qu’est-ce que j’ai raté pendant tout ce temps
Sans oublier que kiss est plus cher comparé à d’autres matériels qui existent
Voilà pour ce premier jet, laissez moi en commentaires vos remarques, dès fois qu’une erreur ce soit glisser ^^
Tchuss
█▀▀ █▀▀█ █▀▀▄ █▀▀
█▀▀ █▄▄█ █░░█ █▀▀
▀░░ ▀░░▀ ▀░░▀ ▀░░
ď̵̵͓̫̲̭͔̄̄̈́͟͞ǒ̵̵͓̫̲̭͔̄̄̈́͟͞m̵̵͓̫̲̭͔̌̄̄̈́͟͞ǒ̵̵͓̫̲̭͔̄̄̈́͟͞ť̵̵͓̫̲̭͔̄̄̈́͟͞ǐ̵̵͓̫̲̭͔̄̄̈́͟͞č̵̵͓̫̲̭͔̄̄̈́͟͞š̵̵͓̫̲̭͔̄̄̈́͟͞.̵̵͓̫̲̭͔̌̄̄̈́͟͞f̵̵͓̫̲̭͔̌̄̄̈́͟͞ř̵̵͓̫̲̭͔̄̄̈́͟͞
