CONTEXTE
Encore un contre temps… Ce coup-ci j’ai perdu le drone, enfin pas moi… Baptise sans qui cet article n’existerait pas. Du coup rebelote, et nouveau drone-build 2021. N’ayant toujours pas reçu ma flightone H7 se sera sous BETAFLIGHT, en 5 pouces, avec une frame TBS sourceone V4.
Pour la petite histoire, le drone perdu était pourvu du GPS et d’un VIFLY que je venais de démonter pour maintenance…
Du coup je vais rédiger une série de POST sur le build de la maturité 😉
Du coup je recommence un peu par la fin, et j’en profite pour rédiger un article pour mes me rappeler de ma démarche, ca me servira de notes.
Réglages et stratégie
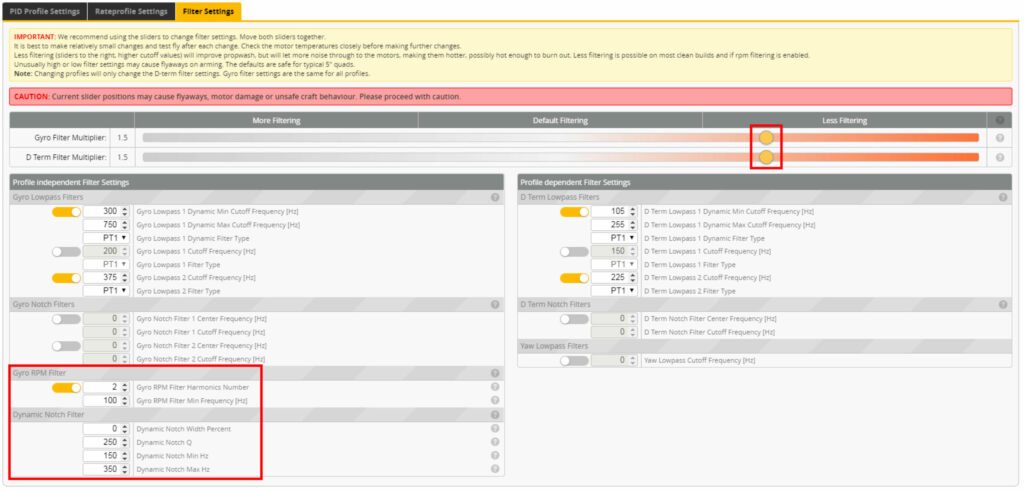
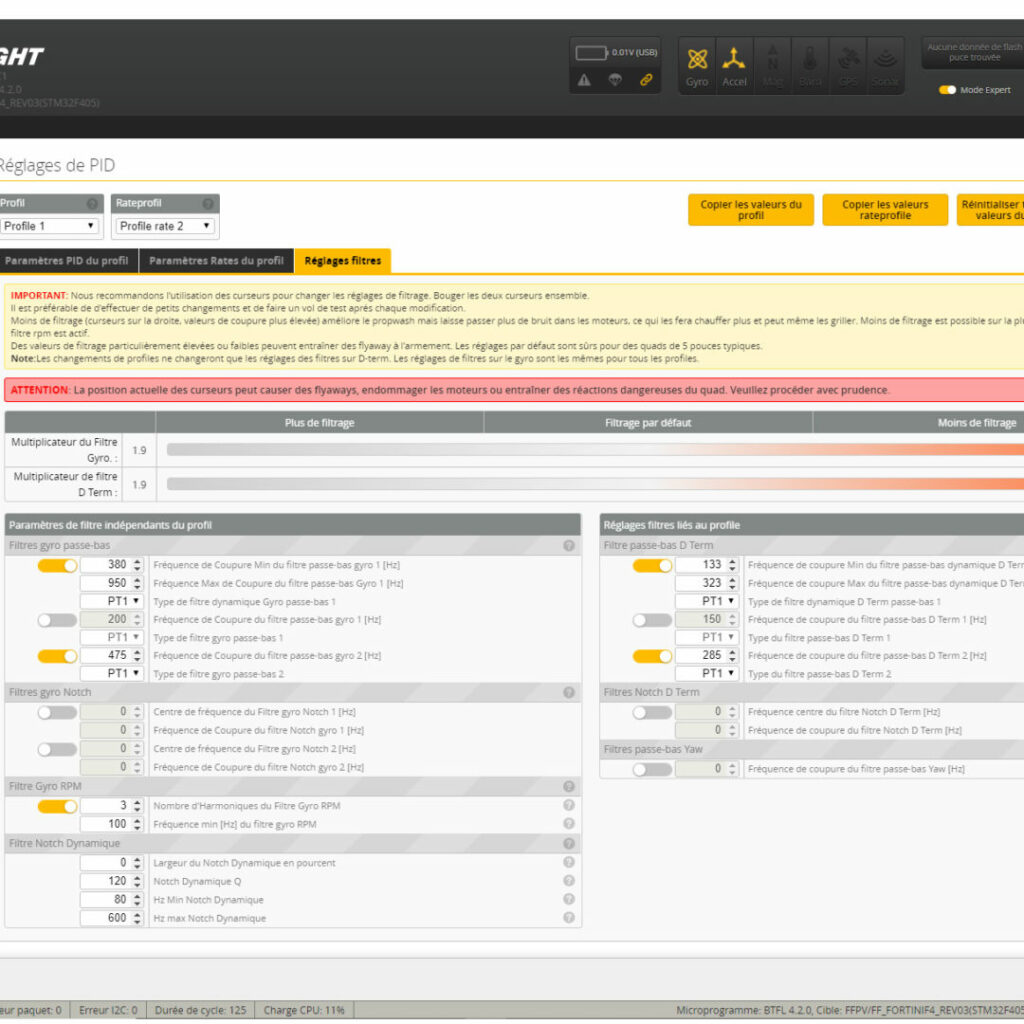
Avant de régler les PID et les rates, il faut s’occuper des filtres
Partons du principe que mon quad est bien monté avec du matériel de construction fiable. Je vais donc enlever un maximum de filtrage pour commencer, et en ajouter à la demande, l’objectif étant d’avoir des vidéos les plus clean possible.
Je vais utiliser comme base la dernière version de betaflight (4.2.8), j’aime bien ne plus y revenir quand ça vole bien. pour l’anecdote, la 4.2.7 n’a jamais vu le jour.
N’hésitez pas aller voir sur internet il existe déjà pas mal de tuto sur le réglage des filtres.
Avant de commencer le paramétrage des filtres BETAFLIGHT, il faut aller voir par là : https://github.com/betaflight/betaflight/wiki/4.2-Tuning-Notes
Ensuite faut prendre des idées des réglages auprès de pilotes aguerris, je pense notamment à UAVtech, Bardwell, Dom FPV, Dauch, et tous les autres que je ne cite pas mais qui mon bien aidé quand même ^^.
RPM-Filter et les autres
RPM-Filter c’est plusieurs filtres Notch dynamique synchronisés sur la vitesse des moteurs, plus sur la courbe des gaz, comme un filtre Notch conventionnel. RPM-Filter va donc (sur le papier) mieux adapter le filtrage : moins de filtre mais plus précis. Ce qui est censé diminuer l’activité processeur et diminuer la latence.
Je vais donc tester RPM-FILTER en 48Khz, si je m’en sors pas, je reviendrais en 24Khz sans RPM-filter. Et qui dit RPM-Filter dit pas de filtre dynamique.
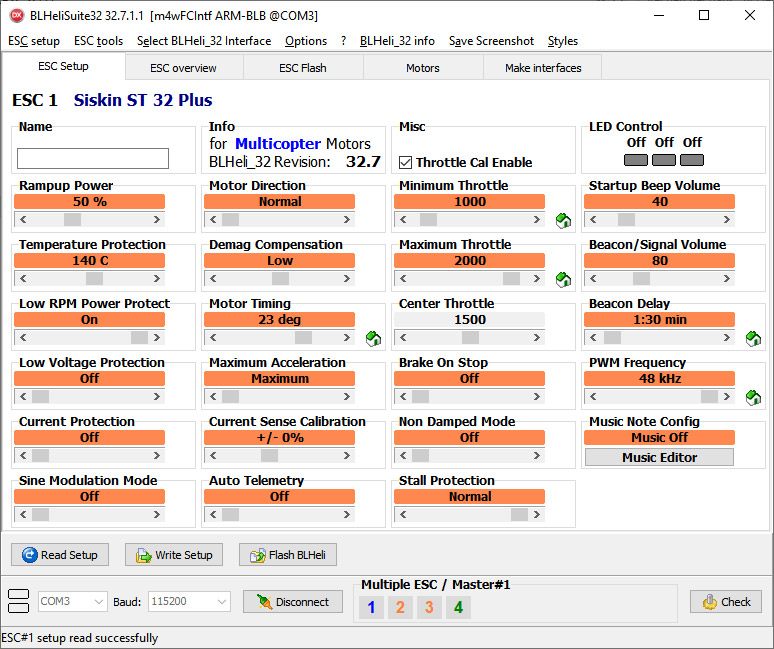
Du coup pour faire tourner le RPM-filter il va nous falloir mettre à jour nos ESC avec blheli configurator, mais pour ça il faudra attendre de pouvoir brancher la LIPO sur les ESC. Du coup vous trouverez ci-dessous mes tuning notes. La suite dans le prochain article.
̴ı̴̴̡̡̡ ̡͌l̡̡̡ ̡͌l̡*̡̡ ̴̡ı̴̴̡ ̡̡͡|̲̲̲͡͡͡ ̲▫̲͡ ̲̲̲͡͡π̲̲͡͡ ̲̲͡▫̲̲͡͡ ̲|̡̡̡ ̡ ̴̡ı̴̡̡ ̡͌l̡̡̡̡._
Mes notes de tuning BETAFLIGHT 4.2.x
- RPM-FILTER
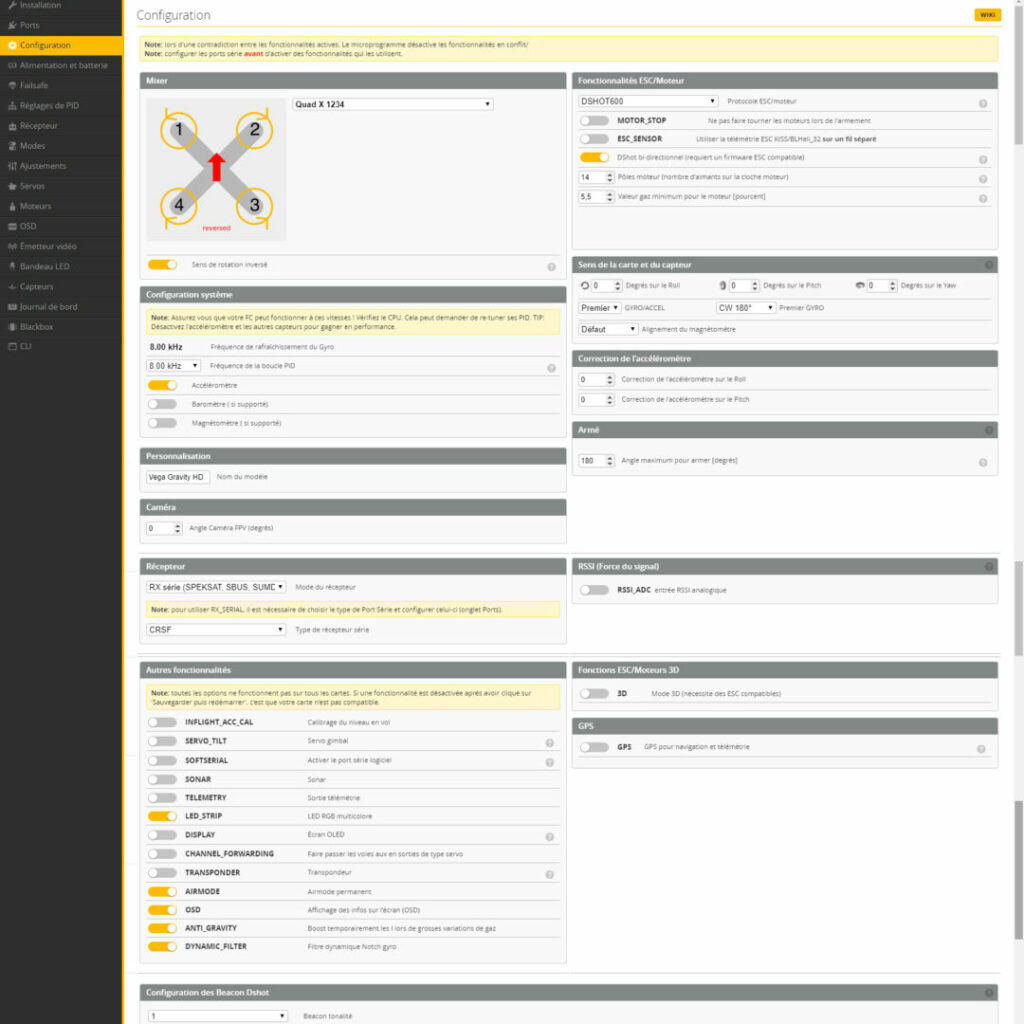
- ESC Dshot 600 – 48khz
- F7 mother board : 8k/8k
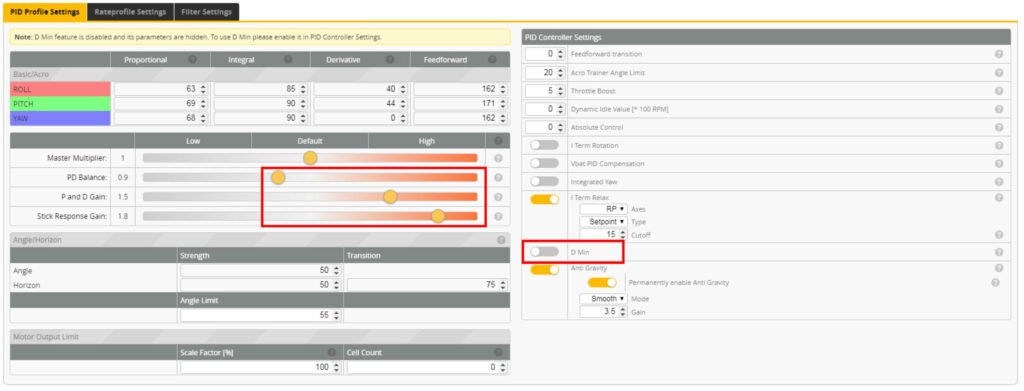
- DMin=off
- ItermRelax=Rp setpoint 15
- Antigravity smooth = 3,5 / 5
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set iterm_relax_cutoff = 10
set rc_smoothing_auto_smoothness = 20
set ff_interpolate_sp = AVERAGED_3
set ff_smooth_factor = 40
set ff_spike_limit = 55
set ff_boost = 0
set feedforward_transition = 40
set yaw_lowpass_hz = 70
set throttle_boost = 5
set throttle_boost_cutoff = 10
set dyn_lpf_dterm_curve_expo = 7
set gyro_rpm_notch_q = 800
set osd_logo_on_arming = ON(<>..<>)
Pilot UAV Tech 5″ FREESTYLE
Le tune par défaut de Betaflight, est basé sur un 6S léger pour une utilisation racing quad. Puisqu’un quad freestyle est beaucoup plus lourd, il nécessite des modifications générales pour un bon réglage de base. Généralement la PD Balance passe de 0.8 to 1.2 et le P & D Gain au niveau du slider passe de 1.3 à 1.7.
Note:
- D_ min turned off (does not help with prop wash)
- Set ESC Motor Timing to 23-deg in BLHeli_32 firmware. In BLHeli_S, M or JESC, set Timing to Medium-High.
- ESC PWM frequency is 24khz. If you prefer 48khz ESC PWM frequency, set as such and paste “set thrust_linear = 25“ in the BF CLI and type “save” [enter] afterwards.
- This tune will be the same for 4S or 6S rigs. Typically the motor KV differential compensates for the voltage increase and/or pilots implement a throttle cap on higher KV 6S quads.
5″ Quad – Setpoint Tracker – Lower Cutoffs Filters (more filtering)
For: 650g to 725g AUW Kwads | 1000 to 1100 deg/sec rates.
Kwads with Noise between 50hz and 200hz
#Filter Settings set dyn_notch_min_hz = 80 set dyn_lpf_gyro_min_hz = 0 set dyn_lpf_gyro_max_hz = 0 set gyro_lowpass_hz = 0 set gyro_lowpass_type = PT1 set gyro_lowpass2_hz = 200 set gyro_lowpass2_type = PT1 set dyn_lpf_dterm_min_hz = 0 set dyn_lpf_dterm_max_hz = 0 set dterm_lowpass_type = PT1 set dterm_lowpass_hz = 0 set dterm_lowpass2_type = BiQUAD set dterm_lowpass2_hz = 125 #For RPM Filter: Without RPM leave at = 8 (default) #Set to 0 if you can afford less Dynamic Notch filtering because RPM is added (reduces to one notch instead of two on DN) #set dyn_notch_width_percent = 8 #PID Gains Settings set vbat_pid_gain = ON set anti_gravity_gain = 10000 set p_pitch = 60 set i_pitch = 70 set d_pitch = 60 set f_pitch = 350 set p_roll = 65 set i_roll = 60 set d_roll = 65 set f_roll = 325 set p_yaw = 100 set i_yaw = 100 set d_yaw = 0 set f_yaw = 125 set d_min_pitch = 45 set d_min_roll = 45 set d_min_boost_gain = 30 set d_min_advance = 0 set pidsum_limit = 1000 #unleashes PID Sum to be 100% (not restricted to 50% by default) #Assumes Freestyle | For racing use "Setpoint" and cutoff = 20 set iterm_relax_type = GYRO set iterm_relax_cutoff = 10 #TPA Settings (which is D-term only by default) set tpa_rate = 80 set tpa_breakpoint = 1750 save
█▒▒▒▒▒▒▒▒▒
Pilot: JJang FPV
About: ‘Responsive but Smooth’ feel, set up for 5″ normal freestyle(cinematic, juicy and more) with Gopro 6/7/8, 4S battery. There is no propwash at all.
Caution: You should activate ‘Bidirectional Dshot’ for rpm filter and adjust ‘idle_min_rpm’ about 70% of dshot_idle_rpm or start with ’21’.
set gyro_lowpass2_hz = 300 set dyn_notch_width_percent = 0 set dyn_notch_q = 250 set dyn_notch_min_hz = 90 set dyn_notch_max_hz = 515 set dyn_lpf_gyro_min_hz = 240 set dyn_lpf_gyro_max_hz = 600 set min_check = 1020 set max_check = 1995 set rc_smoothing_auto_smoothness = 7 set blackbox_device = NONE set min_throttle = 1020 set dshot_idle_value = 500 set dshot_bidir = ON set use_unsynced_pwm = OFF set motor_pwm_protocol = DSHOT300 set deadband = 2 set yaw_deadband = 2 set pid_process_denom = 2 set gyro_rpm_notch_q = 700 set dyn_lpf_dterm_min_hz = 84 set dyn_lpf_dterm_max_hz = 204 set dyn_lpf_dterm_curve_expo = 7 set dterm_lowpass2_hz = 180 set vbat_sag_compensation = 100 set anti_gravity_gain = 3900 set feedforward_transition = 40 set iterm_relax_type = GYRO set iterm_relax_cutoff = 20 set yaw_lowpass_hz = 100 set throttle_boost = 7 set throttle_boost_cutoff = 25 set p_pitch = 65 set i_pitch = 104 set d_pitch = 58 set f_pitch = 116 set p_roll = 60 set i_roll = 99 set d_roll = 54 set f_roll = 109 set p_yaw = 69 set i_yaw = 99 set f_yaw = 109 set d_min_roll = 35 set d_min_pitch = 39 set ff_interpolate_sp = AVERAGED_3 set ff_spike_limit = 70 set ff_smooth_factor = 40 set idle_min_rpm = 21 set roll_rc_rate = 120 set pitch_rc_rate = 120 set yaw_rc_rate = 175 set roll_expo = 15 set pitch_expo = 15 set yaw_expo = 20 set roll_srate = 72 set pitch_srate = 75 set yaw_srate = 41 set tpa_rate = 70 set tpa_breakpoint = 1150 set throttle_limit_type = CLIP set throttle_limit_percent = 98
█████▒▒▒▒▒
PILOT: DOM FPV
PRESET FREESTYLE DOM_FPV BF 4.0 4S #ATTENTION ! RPM filter obligatoire et setup clean, sinon vous cramerez vos moteurs. Vous êtes prévenus ! # #SETUP RECOMMANDE : # - hélices : Tmotor 5143 ou HQ Ethix S4 ou Azurepower Johnny FPV # - moteurs : 2207 1750kv en 6s ou 2700kv en 4s ; roulements EZO ou NSK # - FC : F4 ; gyro MPU6000 ; softmount # - frame type hybride-X # #Copier et coller ce texte dans le CLI du Betaflight configurator et n'oubliez pas de taper "save" puis entrée #en cas de problème sur le preset, contactez moi via facebook messenger #on fixe le gyro LPF1 à 100Hz en PT1 et on desactive le gyro LPF 2 set gyro_lowpass_type = PT1 set gyro_lowpass_hz = 100 set gyro_lowpass2_type = PT1 set gyro_lowpass2_hz = 0 set dyn_lpf_gyro_min_hz = 0 set dyn_lpf_gyro_max_hz = 0 #on réduit l'effet du filtre notch dynamique set dyn_notch_range = MEDIUM set dyn_notch_width_percent = 0 set dyn_notch_q = 200 set dyn_notch_min_hz = 130 #on désactive le D-term LPF2 et on fixe le D-term LPF1 à 100Hz en Biquad set dyn_lpf_dterm_min_hz = 0 set dterm_lowpass_type = BIQUAD set dterm_lowpass_hz = 100 set dterm_lowpass2_type = PT1 set dterm_lowpass2_hz = 0 #réglages PID 4s ; on désactive le d_min set p_pitch = 65 set i_pitch = 83 set d_pitch = 35 set p_roll = 63 set i_roll = 80 set d_roll = 33 set p_yaw = 40 set i_yaw = 100 set d_yaw = 0 set d_min_roll = 0 set d_min_pitch = 0 set d_min_yaw = 0 set abs_control_gain = 0 set use_integrated_yaw = OFF #feedforward !agressif (feedforward_transition à 20 pour plus de douceur) set feedforward_transition = 10 set f_pitch = 150 set f_roll = 150 #on libère le yaw !!!!! set pidsum_limit_yaw = 1000 #rates blackbird (augmenter _expo de 10 ou 15 pour plus de douceur) set rates_type = RACEFLIGHT set roll_rc_rate = 38 set pitch_rc_rate = 38 set yaw_rc_rate = 38 set roll_expo = 37 set pitch_expo = 37 set yaw_expo = 37 set roll_srate = 160 set pitch_srate = 160 set yaw_srate = 160 #pour faire une analyse blackbox avec gyro non filtré set debug_mode = GYRO_SCALED set blackbox_p_ratio = 256
███████▒▒▒
PILOT: DAUCH
Trouver sur son site les réglages du vegas : https://www.dauch.fr/product/vega-5-2020-settings-freestyle-hard-pids-rpm-filter-betaflight-4-2-blheli32-32-7/
██████████
¯\_(ツ)_/¯
[●▪▪●]
SOURCES & DOCUMENTATIONS
<$><$> {-_-} <$><$>
GG merci pour les conseils, pas deTBS dans ton prochain build ??