Drone Build 2023 – DJI AVATAR en mieux ?
Bienvenue dans le monde passionnant de la fabrication de drones ! En cette nouvelle saison, j'ai décidé de me lancer dans la construction low cost de mon propre DJI AVATAR.…
Bienvenue dans le monde passionnant de la fabrication de drones ! En cette nouvelle saison, j'ai décidé de me lancer dans la construction low cost de mon propre DJI AVATAR.…
Je suis tombé sur un très bon article d'Oscar Liang, concernant la DESYNC. Perso je rencontre quelques problèmes avec mon moblite 7, je vais essayer de suivre ses conseils pour…
Le RPM-Filter est arrivé avec le version 4 de BETAFLIGHT, sa configuration est devenue super simple depuis Betaflight 4.1, le plus dur est probablement de mettre à jour votre FC et votre ESC 🙂 Si vous trouvez le guide officiel trop difficile à avaler, vous trouverez peut-être mon tutoriel sur ce RPM filter utile.
(´◉◞౪◟◉)
(suite…)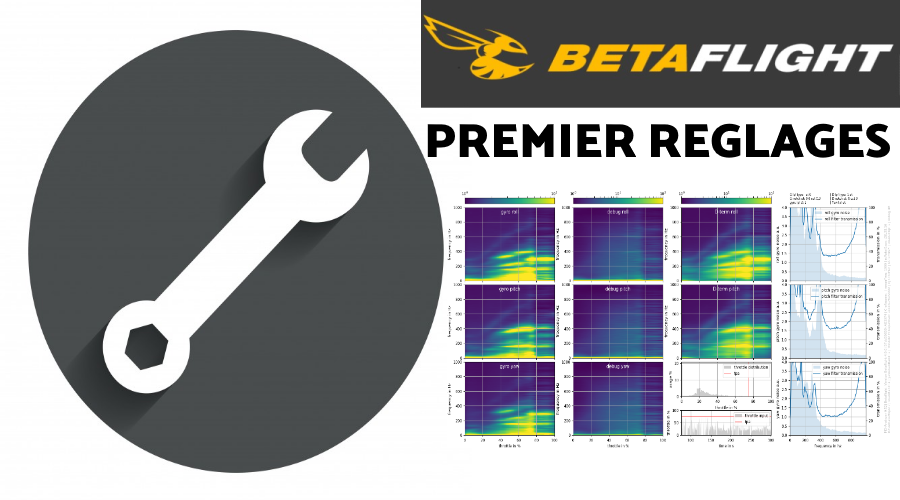
Encore un contre temps… Ce coup-ci j’ai perdu le drone, enfin pas moi… Baptise sans qui cet article n’existerait pas. Du coup rebelote, et nouveau drone-build 2021. N’ayant toujours pas reçu ma flightone H7 se sera sous BETAFLIGHT, en 5 pouces, avec une frame TBS sourceone V4.
Pour la petite histoire, le drone perdu était pourvu du GPS et d’un VIFLY que je venais de démonter pour maintenance…
Du coup je vais rédiger une série de POST sur le build de la maturité 😉
Du coup je recommence un peu par la fin, et j’en profite pour rédiger un article pour mes me rappeler de ma démarche, ca me servira de notes.
Tout le monde se pose un jour mais quel est donc le meilleur firmware pour vol FPV ? les avis divergent, et pourquoi les avis divergent ? parce que personne n’est d’accord dans le FPV ! 🤫
Bref, c’est le genre de conversation qu’on retrouve fréquemment sur les groupes FPV lorsque on pose la question, mais alors, quel est le meilleur firmware pour mon contrôleur de vol ??
Je vais tenter de vous accompagner pour faire votre choix, mais je vous préviens tout de suite, ouvrez une bière ça risque d’être long.
Afin de froisser personne, je vais plutôt essayer de vous expliquer pourquoi certains ont choisi tel ou tel micrologiciel, et non pas qu’elle est le meilleur parce qu’il n’y a pas de meilleur firmware , si d’ailleurs tel était le cas on volerait tous en DJI. 😂😂😂
Mais qu’est ce qui attire les usagers vers l’un de ces firmware plutôt qu’un autre? Et pourquoi DJI et son système FPV est encore loin de tout ça ….
Petit pense bête perso de mes différents réglages de BETAFLIGHT 4.2, vous retrouverez ci-dessous le câblage et les paramètres BF4.2 pour mon drone 7 pouces orienté LR/CINEMATIQUE. A noter que mes ESC MAMBA F50PRO sont en 48Khz pour pouvoir activer le RPM Filter. Les rates utilisés sont vraiment cool et plutôt destiné aux débutants.
(suite…)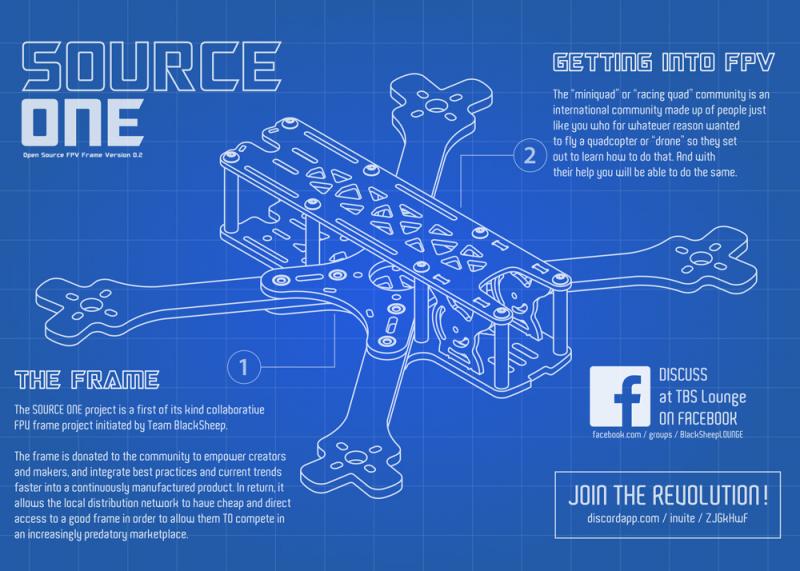
Pour faire suite aux articles déjà publiés:
1) Choix des moteurs pour un QUAD 7 pouces
2) Choix du chassis pour un drone 7 pouces orienté Long range
3) Montage et première impression du drone
Voici mes premières impressions, après quelques LIPO. Déjà le drone vol super bien avec des paramètres stock. Je suis content du résultat brut sans réglages avancés. Même si le drone vol bien j’ai quelques harmoniques à 160Hz mais je pense qu’avec un filtre bien placé je devrais éliminer ces vibrations. Pour rappel, voici la configuration :
(suite…)
Pour faire voler un Racer à sa sauce, on a souvent besoin d’intervenir sur les PID. Je vais faire une petite série d’article la dessus. Pour commencer doucement je vous conseille de démarrer avec le point de vue de DAMIEN GANS aka blackbirdFPV
Dans un autre style, il y a également la vidéo forte intéressante de DOM, avec un vision plus technique.
(suite…)