On va voir dans ce tuto la mise à jour du HAPPYMODEL MOBLITE7 vers BETAFLIGHT 4.2.8, et par la même occasion passer en RPM-Filter et 48Khz, pour voir si ça marche mieux et si le 48Khz procure un temps de vol supérieur. Je vous conseille d’aller voir avant mes 2 articles sur le RPM filter et les preset du whoop 1S de Mr Shutterbug, qui vous permettront de mieux comprendre la manip. Cet article est surtout un pense bête pour moi, histoire de ne pas avoir a galérer la prochaine fois ^^.
̴ı̴̴̡̡̡ ̡͌l̡̡̡ ̡͌l̡*̡̡ ̴̡ı̴̴̡ ̡̡͡|̲̲̲͡͡͡ ̲▫̲͡ ̲̲̲͡͡π̲̲͡͡ ̲̲͡▫̲̲͡͡ ̲|̡̡̡ ̡ ̴̡ı̴̡̡ ̡͌l̡̡̡̡._
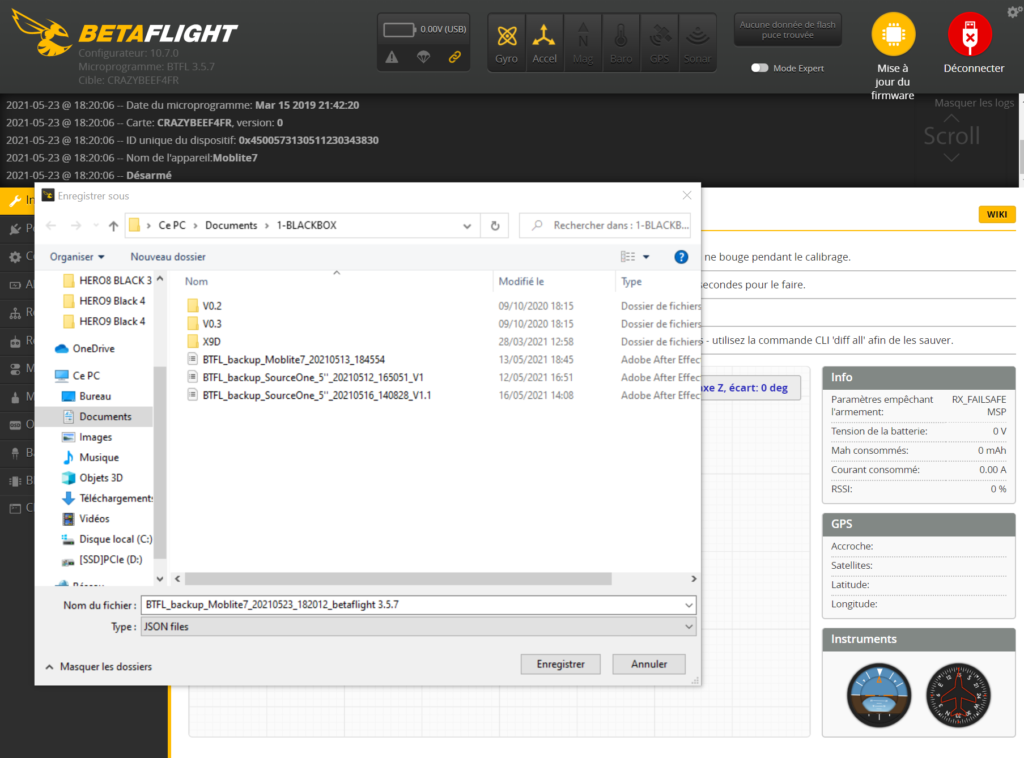
SAUVEGARDE DE VOTRE CONFIGURATION
Avant toute chose, on va faire la sauvegarde de notre config de BETAFLIGHT 3.5.7, histoire de se rappeler du mappage des moteurs sortit de boite.
‛¯¯٭٭¯¯(▫▫)¯¯٭٭¯¯’
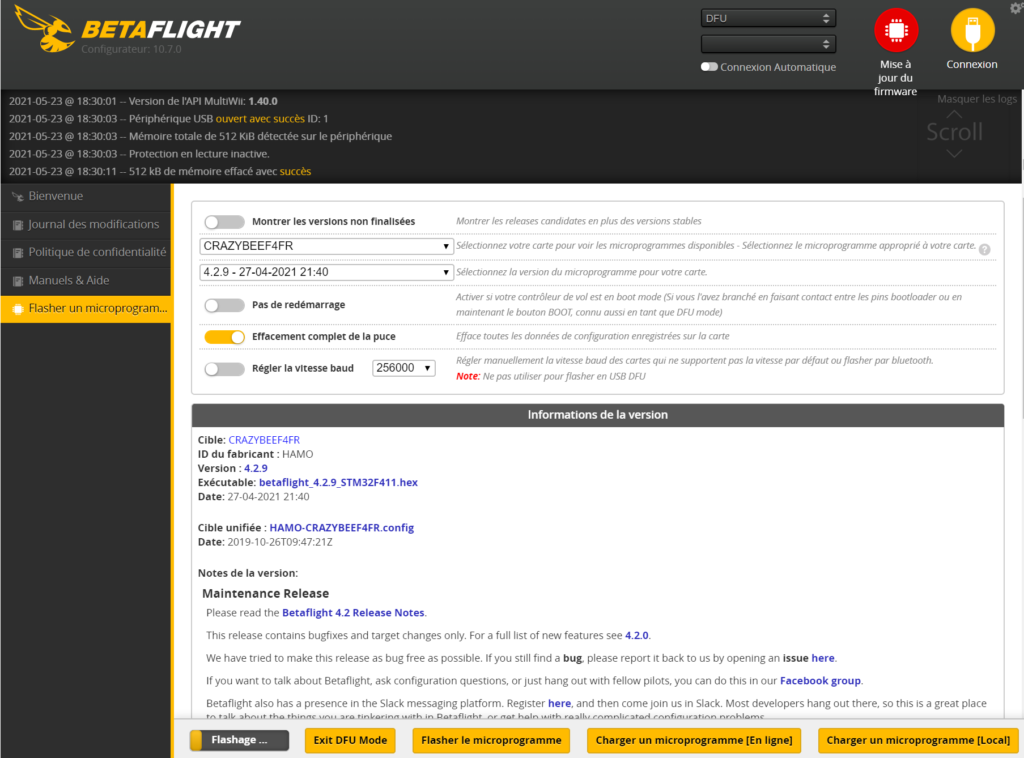
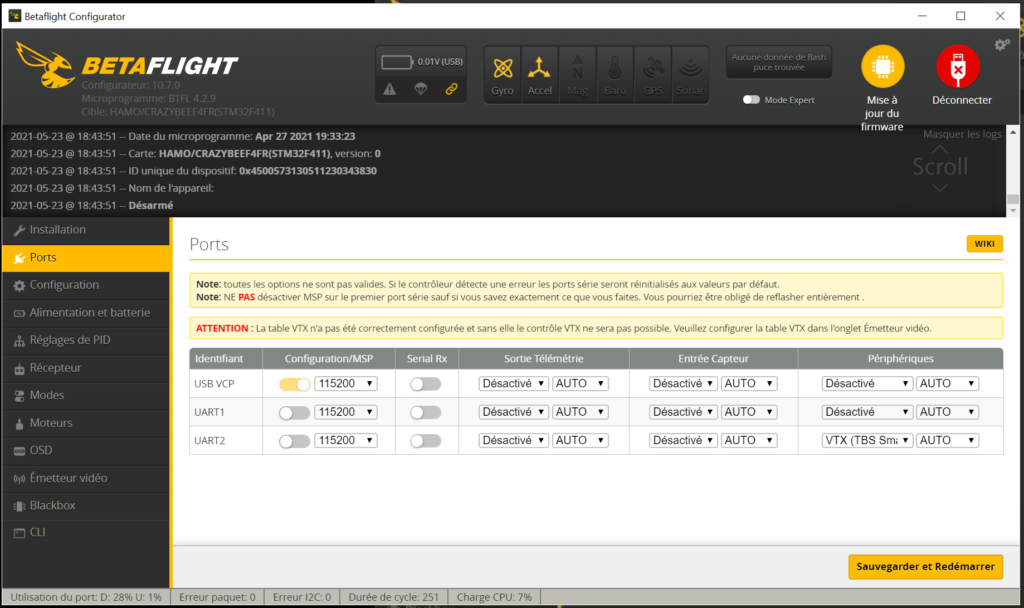
Mise a jour du Firmware BETAFLIGHT 4.2.8
Ensuite on va mettre à jour avec la dernière version de BETAFLIGHT, il faudra prendre soin de choisir la bonne carte, pour ma part ce sera la version FR (Frsky) pour le contrôleur de vol: CRAZYBEEF4FR (perso j’ai appliqué les paramètres par défaut de la carte).
¸.·´¯·.´¯·.¸¸.·´¯`·.¸><(((º>
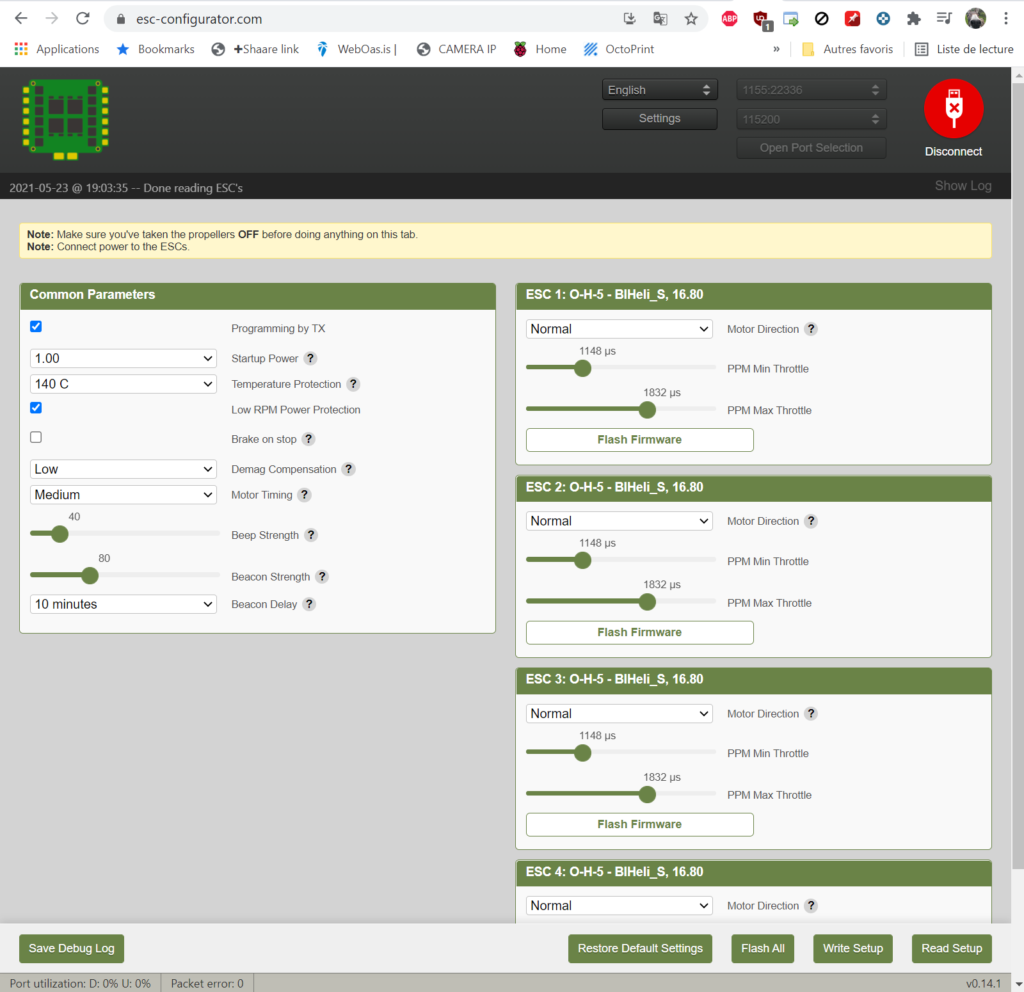
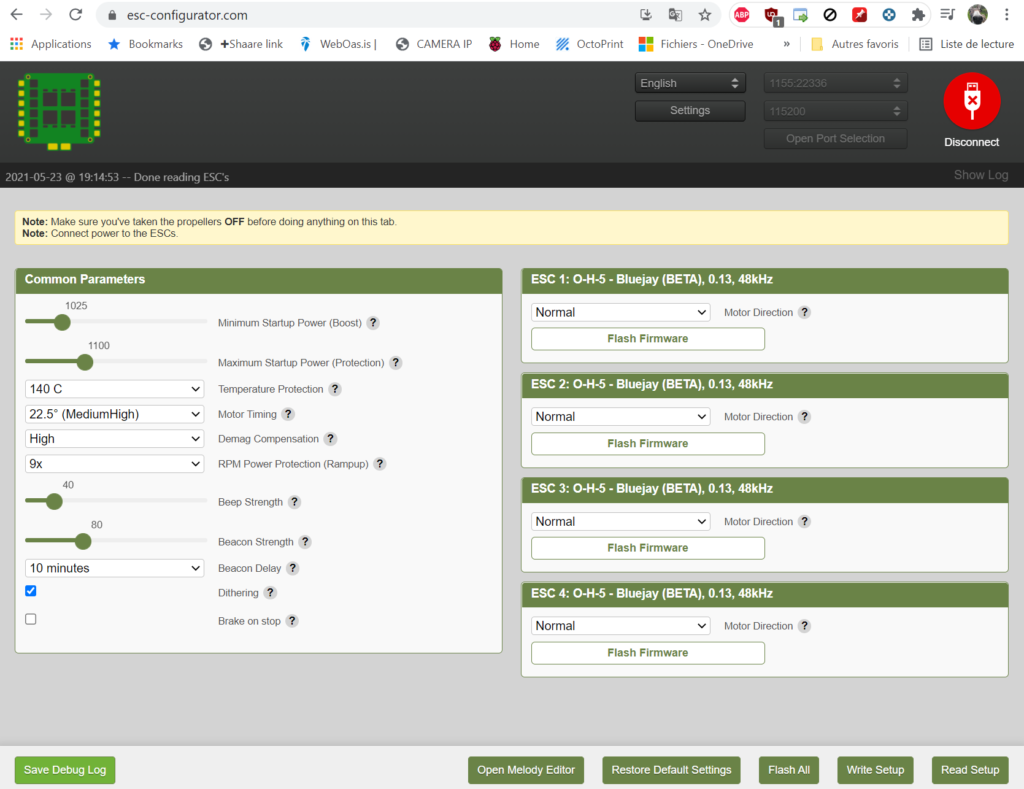
MISE A JOUR DES ESC
Mettre à jour les ESC, flasher les ESC avec la dernière version BLUEJAY en 48 Khz pour cela pas de prise de tête faite le en ligne pour flasher la dernière version de Blue Jay, ça se trouve par ici: https://esc-configurator.com/
En écrivant ce tuto je suis tomber sur un site web consacré exclusivement aux musiques joué par les moteurs au démarrage de BETAFLIGHT : https://esctunes.com
¯¯̿̿¯̿̿’̿̿̿̿̿̿̿’̿̿’̿̿̿̿̿’̿̿̿)͇̿̿)̿̿̿̿ ‘̿̿̿̿̿̿\̵͇̿̿=(•̪̀●́)=o/̵͇̿̿/’̿̿ ̿ ̿̿
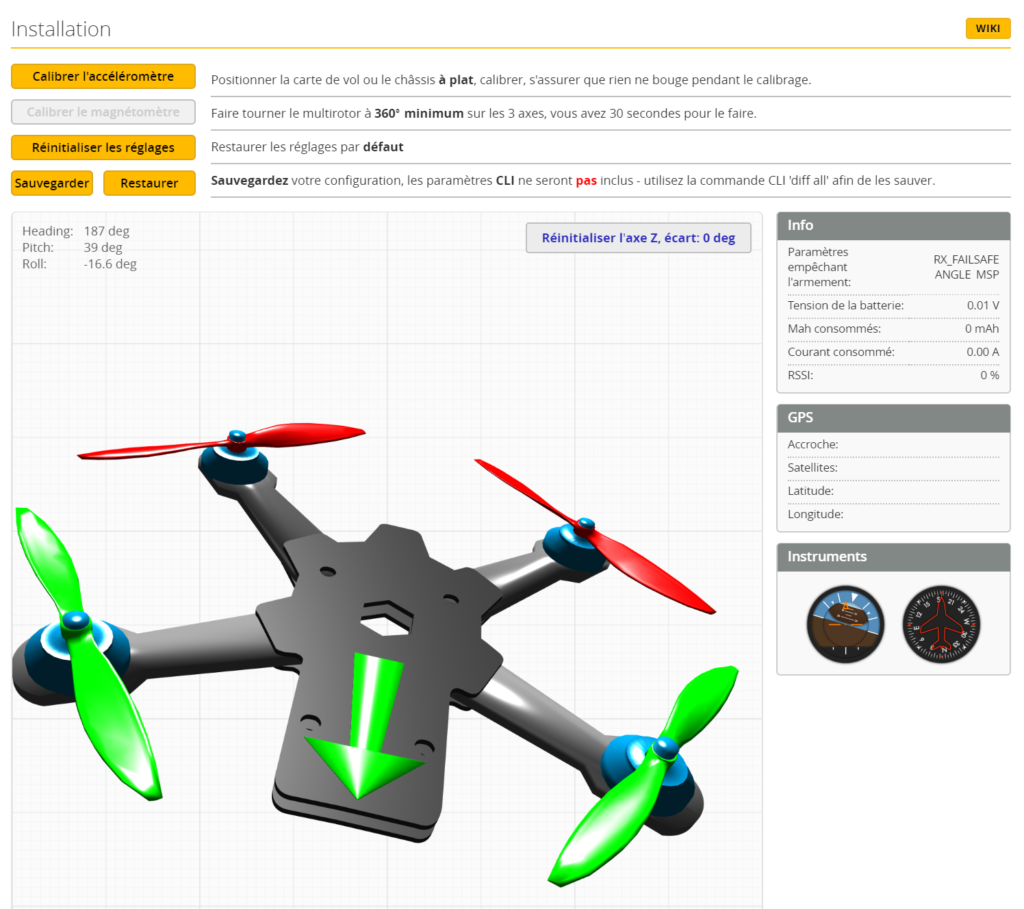
CONFIGURATION BETAFLIGHT DU WHOOP
En même temps que vous calibrez l’accéléromètre, vous devriez voir que l’orientation de la FC par défaut n’est pas le bon. (il faut mettre 180° dans l’onglet configuration).
Ensuite deuxième chose à faire est de paramétrer le VTX
BIND DU RECEPTEUR
Maintenant, il est temps d’ajouter le récepteur FRSKY à nouveau, la mise à jour du firmware ayant tout effacé. Pour ça il va falloir bind a nouveau le récepteur et la télécommande. je vous conseille de taper la commande suivante depuis le CLI: (attention pour BF 4.2 uniquement)
bind_rx▬▬ι═══════ﺤ -═══════ι▬▬
MAPPAGE DES MOTEURS
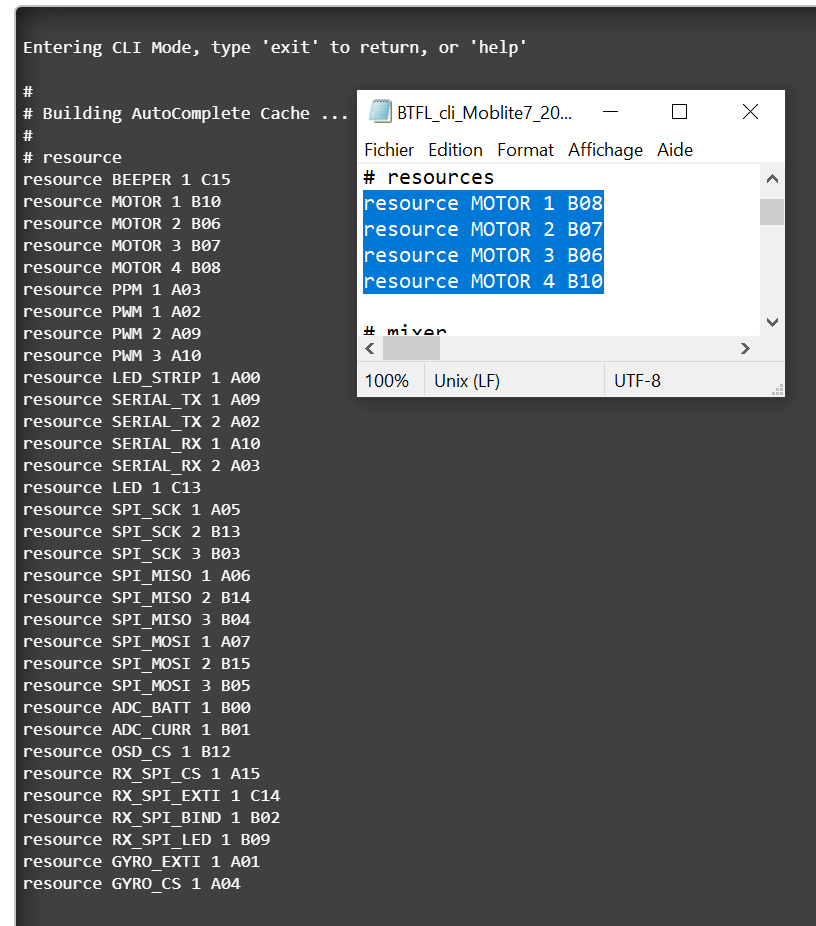
https://culturefpv.fr/remapper-moteur-betaflight-guide-20200211/
٩(͡๏̯͡๏)۶
CONFIGURATION DES RATES ET DES FILTRES
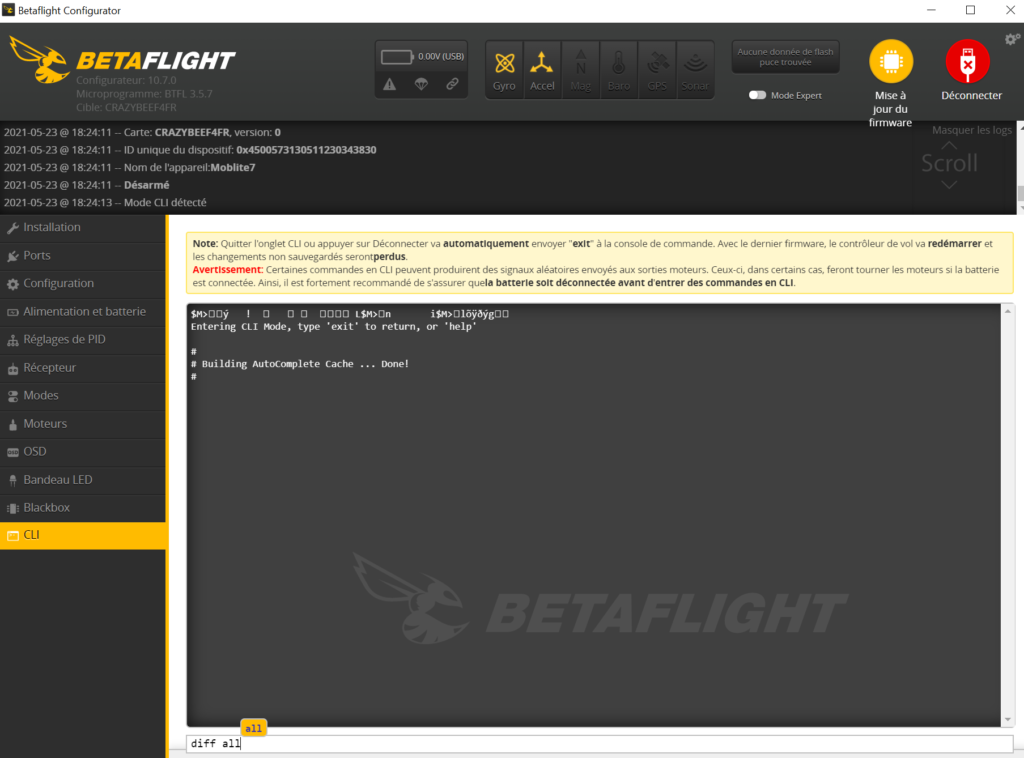
Tant que vous avez votre fichier diff all de la précédente version ouvert profitez en pour copier vos rates, mais pas vos filtres ni vos PID il risque de changer un peu ….
set thr_mid = 35
set thr_expo = 20
set roll_expo = 20
set pitch_expo = 20
set yaw_expo = 10
set roll_srate = 55
set pitch_srate = 55
set yaw_srate = 55
set tpa_rate = 30
set tpa_breakpoint = 1200Ensuite j’ai coller la partie filtrage qui se trouve dans l’article de Mr Shutterbug
feature -AIRMODE
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_min_hz = 125
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set rc_smoothing_auto_smoothness = 7
set fpv_mix_degrees = 13
set dshot_idle_value = 700
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT300
set motor_poles = 12
set thr_corr_value = 3
set thr_corr_angle = 650
set vbat_max_cell_voltage = 440
set vbat_min_cell_voltage = 300
set vbat_warning_cell_voltage = 310
set yaw_motors_reversed = ON
set small_angle = 180
set pid_process_denom = 4
profile 0
set dyn_lpf_dterm_min_hz = 105
set dyn_lpf_dterm_max_hz = 255
set dyn_lpf_dterm_curve_expo = 7
set dterm_lowpass2_hz = 225
set iterm_relax_cutoff = 20
set yaw_lowpass_hz = 100
set throttle_boost = 7
set throttle_boost_cutoff = 25
set p_pitch = 69
set d_pitch = 68
set f_pitch = 133
set p_roll = 63
set d_roll = 62
set f_roll = 126
set p_yaw = 68
set f_yaw = 126
set angle_level_strength = 90
set level_limit = 65
set d_min_roll = 0
set d_min_pitch = 0
set ff_spike_limit = 70
set ff_smooth_factor = 20
٩(- ̮̮̃-̃)۶
Pour le moment j’en suis là, le drone à voler et plutôt bien, il faut que je revois un peu les PID et les rates, mais ça fonctionne. Je modifierais cette article au fur et a mesure que mes manips avancent.