Je suis tombé sur un très bon article d’Oscar Liang, concernant la DESYNC. Perso je rencontre quelques problèmes avec mon moblite 7, je vais essayer de suivre ses conseils pour améliorer mes vols. En voici la traduction
♫♪.ılılıll|̲̅̅●̲̅̅|̲̅̅=̲̅̅|̲̅̅●̲̅̅|llılılı.♫♪
Symptôme du DESYNC
Lorsque l’un des moteurs de votre quad s’arrête de tourner de manière inattendue et que le quad tombe dans les airs, cela peut être causé par ESC Desync. Voici quelques paramètres BLHeli et Betaflight qui pourraient corriger ESC Desync.
Qu’est-ce que la désynchronisation ESC ?
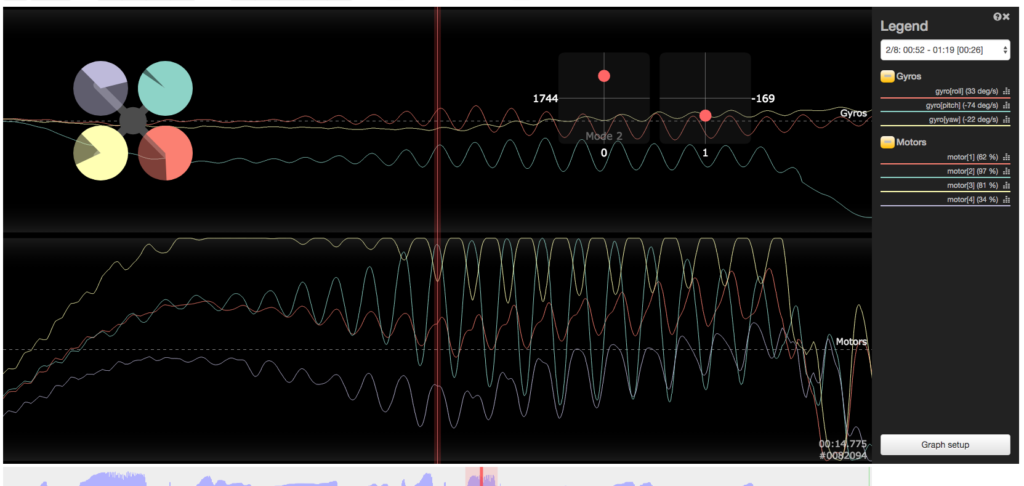
Si vous avez la chance d’avoir accès à vos logs, une désynchronisation ESC se produit lorsqu’un moteur cale même si le signal du moteur atteint son maximum. Il en résulte que le quad tombe du ciel.
Les causes courantes sont un régime excessivement élevé et le bruit électrique.
Lorsque le régime moteur est trop élevé, l’ESC peut manquer le « passage à zéro » du moteur (commutation). Le bruit électrique dans le signal peut aggraver la situation.
Si l’ESC ne peut pas détecter avec précision le « passage à zéro » qui approche, il ne saura pas quand déclencher la prochaine impulsion (pour créer le champ magnétique nécessaire pour pousser le moteur) et le moteur finira par s’arrêter.
‛¯¯٭٭¯¯(▫▫)¯¯٭٭¯¯’
Solutions à la désynchronisation ESC
Pour corriger ESC Desync (ou réduire les chances que cela se produise), vous pouvez essayer de modifier certains paramètres dans BLHeli et Betaflight. Une ou plusieurs de ces suggestions pourraient résoudre votre problème, et il n’est pas nécessaire qu’elles soient toutes nécessaires en même temps.
Installez un condensateur ESR faible à la puissance de votre ESC si vous ne l’avez pas déjà fait, cela éliminera une partie du bruit.
Paramètres BLHeli :
- Rampup Power (ou Startup Power) – utilisez une valeur inférieure comme 0,125 pour BLHeli_S ou 12% pour BLHeli_32 ESC
- Compensation Demag – réglée sur haute car elle aide le quad à récupérer de Desync au lieu de simplement tomber au sol au détriment des performances
- Oscar Liang va plus en détails sur ce que font ces paramètres dans ce post .
Paramètres Betaflight :
- Utilisez DShot si vous ne l’êtes pas déjà
- Motor Idle Throttle Value – la valeur par défaut est 5,5, ce qui est assez prudent pour les petits quads. Essayez une valeur légèrement plus élevée comme 6,5 ou 7
Voilà je reviendrai vers vous quand j’aurais terminé mes essais, abientôt, soyez fort et bonnes vacances.
Fanf
̴ı̴̴̡̡̡ ̡͌l̡̡̡ ̡͌l̡*̡̡ ̴̡ı̴̴̡ ̡̡͡|̲̲̲͡͡͡ ̲▫̲͡ ̲̲̲͡͡π̲̲͡͡ ̲̲͡▫̲̲͡͡ ̲|̡̡̡ ̡ ̴̡ı̴̡̡ ̡͌l̡̡̡̡._