Vous le savez tous, votre quad est contrôlé par cette fameuse boucle PID. Lorsque nous effectuons des flips et des tonneaux, nous modifions la » commande » (ce que nous appelons le point de consigne dans le monde des quads [c’est-à-dire les manches]), ce qui fait réagir la boucle PID.
L’objectif du réglage est d’ajuster la boucle PID afin qu’elle réponde le plus rapidement possible aux commandes, sans dépassement ni oscillation.
possible, sans dépassement ni oscillation. Ces principes s’appliquent à TOUS LES CONTRÔLEURS PID ! de tous les firmware de vol et de n’importe quelle taille de drone. Le guide et les vidéos se concentrent sur Betaflight car c’est le firmware le plus utilisé. les mêmes principes s’appliquent à : FalcoX, KISS, iNAV, Cleanflight, EmuFlight, Baseflight, etc. Ils utilisent tous un contrôleur PID
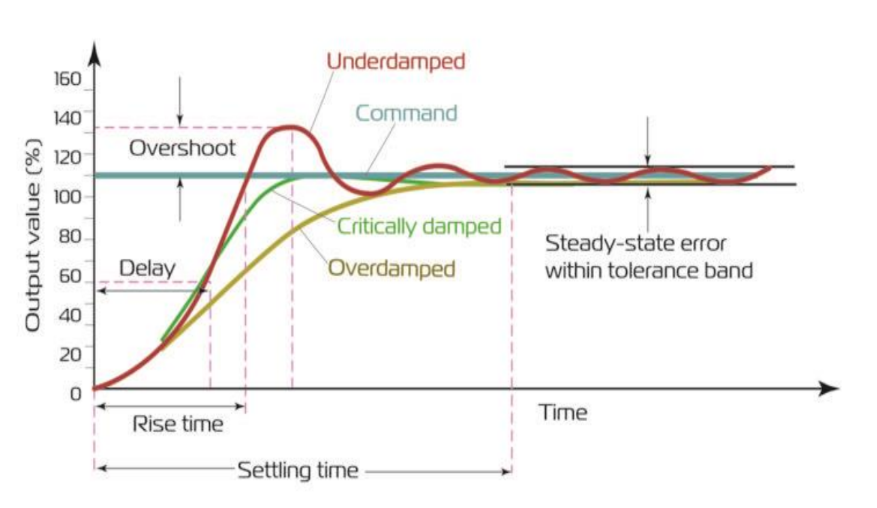
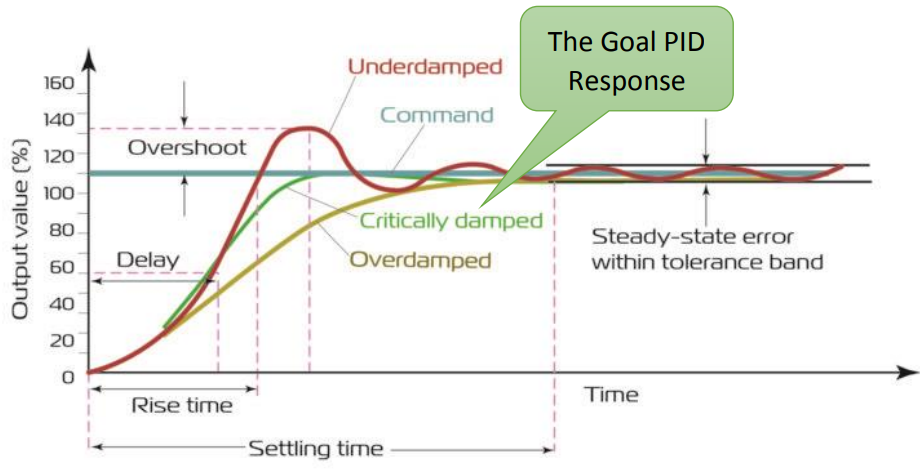
Dans cet exemple, la commande va de 0 à 110% . La boucle PID est utiliser pour déplacer la machine – dans notre cas le quad – vers la nouvelle valeur. La ligne de commande est notre bâton. Les lignes rouge, verte, et jaunes sont les différents gyros (mouvement du quad) basées sur différents sur la base de différents réglages PID. Vous voulez un réglage qui produit une « réponse « amortie de façon critique
(mesurée par le retour du gyroscope à la la boucle PID).
Vous voulez un réglage qui produise une réponse Critically damped
(mesurée par la réaction du gyroscope à la la boucle PID).
Le réglage de votre quadcoptère est un processus facile qui implique les 4 étapes clés ci-dessous. Cela ne prend qu’un ou deux paquets. Il peut être fait en ligne de vue (LOS), avec des lunettes FPV, ou en utilisant la Blackbox. J’utilise beaucoup la Blackbox car elle aide à comprendre ce qui se passe (à l’expliquer) et aussi parce qu’elle donne la plus grande précision dans le réglage, mais il n’est PAS mais il n’est PAS nécessaire d’utiliser la Blackbox pour régler votre quad. Les étapes sont décrites plus en détail ci-dessous. Les étapes #1 à #3 sont critiques pour une bonne performance générale de vol, incluant : une bonne tenue de l’hélice ; pas d’oscillations ou de vibrations ; pas de « throbbles » (flottement du nez sur les
l’accélérateur) ; bonne réaction au vent suivi précis du manche (sensation directe).
Sommaire
Étape 1 – Réglez vos filtres – Le contrôleur PID ne peut pas fonctionner correctement s’il lutte contre les vibrations du signal du gyroscope.
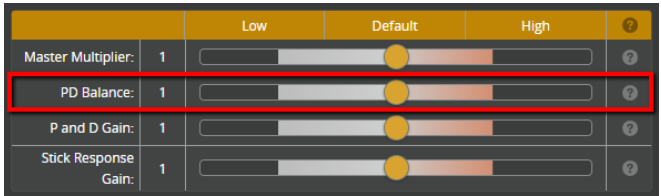
Étape 2 – Réglez la balance P/D – Chaque quad a une balance P/D spécifique que nous devons trouver.
Étape 3 – Régler le gain ‘PD Gain’ – augmente la vitesse de l’influence (force) que les gains PID exercent sur les moteurs.
Étape 4 – Réglage de la fonction FeedForward (« FF ») – Ajout d’un quatrième terme de contrôle pour réduire la latence inhérente à un contrôleur PID standard.
Étape 1 – Réglez vos filtres :
a) Configurez votre quad en utilisant les nouveaux filtres RPM. Voir Betaflight 4.1 Filter Setup – Les encoches RPM sont l’avenir !
Future ! pour plus de détails sur ce processus. L’avantage des filtres RPM – POUR TOUTE CLASSE DE QUAD – est double :

1) les filtres RPM suivent et écrasent plus précisément le bruit de pointe du moteur.
2) ils libèrent l’encoche dynamique pour rechercher et suivre la résonance du cadre ou d’autres pics de bruit (antennes qui vibrent, cadre fissuré, etc…) et les écraser. Une fois que les filtres RPM sont configurés selon la vidéo (avec les ajustements de Dynamic Notch), passez à l’étape b).
b) Travaillez les curseurs du filtre passe-bas ENSEMBLE en haut de l’onglet Filtres pour essayer d’obtenir un 1,5 ou 2,0.
Avec les autres réglages (comme indiqué dans la vidéo ci-dessus), vous obtiendrez un équilibre raisonnable entre le gain de délai du filtre et le fait de ne pas aller trop bas. l’économie de temps de filtrage par rapport au fait de ne pas aller trop bas et de sous-filtrer votre quad.
LE KILOMÉTRAGE VARIE ICI ! Faites donc
Donc, faites-le lentement en augmentant d’une ou deux étapes à la fois, avec des vols à plein régime et des déplacements difficiles entre les deux.
VÉRIFIEZ LA TEMPÉRATURE DE VOTRE MOTEUR à mesure que vous montez les échelons. Ecoutez les bruits excessifs (grincement) sur les moteurs au ralenti ou en vol. Faites des virages et des mouvements brusques. Voyez si les choses s’améliorent si les choses s’améliorent ou se dégradent au fur et à mesure que vous montez dans les curseurs. Si c’est mieux, augmentez-les encore. Si c’est pire, arrêtez et
reculez d’une position. Il est possible que le moteur ne soit pas chaud, mais les performances de vol peuvent se dégrader avec des filtres trop élevés (le rapport bruit/signal devient trop élevé sur le D-term). Utilisez vos sens et votre perception pour savoir si le propwash des hélices s’améliore ou s’aggrave au fur et à mesure que vous montez dans les curseurs.
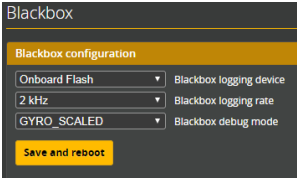
OPTIONNEL : Faites un log blackbox avec les paramètres suivants dans l’onglet BlackBox :
Faites un vol à plein régime et avec des mouvements durs. Ne frappez PAS les objets et évitez tout
éviter tout rebond au sol au début ou à la fin du vol (ce n’est pas critique, mais cela peut déstabiliser les outils d’analyse si l’avion n’est pas trié).
mais peut perturber les outils d’analyse s’il n’est pas compensé). Regardez un spectre du
signal du gyroscope et du signal du terme D. Assurez-vous que tous les pics de bruit sont complètement
complètement écrasés dans le spectre du signal du gyroscope et que le signal D-term n’a pas
n’a pas de bruit excessif entre 100 et 200 Hz.
Pour un guide vidéo sur le vol et l’examen des journaux pour régler vos filtres, voir :
Principes de réglage du PID : Step #1 – Filters Tuning (guide pour obtenir le log de bruit brut)
Principes de réglage des PID : Step #1 Follow-up – Finalize YOUR Filters (comment personnaliser vos filtres)
Pour les bases des filtres OU pour une compréhension approfondie du fonctionnement des filtres et de ce qu’est le « retard de phase », voir
ma série sur les principes fondamentaux des filtres.
En général, vous voulez utiliser des filtres Gyro pour écraser les pics de vibrations haute fréquence du moteur (« bruit »).
Ensuite, utilisez le filtrage du terme D pour dompter la propriété du D term de doubler la réponse du gain au bruit lorsque le bruit double en fréquence.
au bruit lorsque le bruit double en fréquence. En d’autres termes, les bruits de haute fréquence (100hz+) rendent le D-term fou, ce qui entraîne des vibrations dans les moteurs HOT ou de vol doux.
ETAPE #2
Collez le texte ci-dessous dans l’onglet CLI de BF. Cela va désactivera toutes les fonctions de contrôle PID avancé de BetaFlight.
BetaFlight ; les fonctions qui poussent le contrôleur PID au-delà des principes de base. Une fois collé, faites un vol avec beaucoup de flips et de rolls (Line-of-Sight ou FPV). FPV), des entrées de manche brusques d’avant en arrière et continuez à et continuez à augmenter les gains P jusqu’à ce que vous voyiez un fort rebond. Pour le LOS ou le FPV, vous devez vraiment l’écouter plutôt que de le voir (il est si rapide). plutôt que de le voir (il est si rapide). Il est cependant facile de le visualiser en boîte noire (BBL). Vous pouvez régler vos gains D sur le même nombre pour le tangage et le roulis en fonction de la vitesse de l’avion. Vous pouvez régler vos gains D sur le même nombre pour le tangage et le roulis en fonction du bruit de fond après votre configuration de filtrage à l’étape 1. Ceci est subjectif basé sur le niveau de bruit que vous voulez que votre signal de terme D soit pour le PID Sum. Le meilleur conseil est 30’s ou 40’s pour un quad 4S 5-in. Pour un quad de 6S 5-in, on peut descendre dans les 20 et 30. Pour un whoop sans balai, plutôt dans les 60 ou 70. Vous voulez continuer à augmenter les gains P jusqu’à ce que vous commenciez à avoir un dépassement basé sur des entrées de manche pointues. puis diminuez un peu pour obtenir la réponse en escalier « Critically damped » (voir Figure 7).
Encore une fois, il est plus facile de l’écouter en LOS ou en FPV. Pour le voir, regardez un BBL.
Pour un guide vidéo sur cette étape, et ce qu’il faut rechercher dans la boîte noire, voir :
Principes de réglage du PID : Étape 2 – Réglage du contrôleur PID (rapport P/D)
Commandes CLI à coller et à sauvegarder avant de compléter l’étape #2 :
PID Gains Settings
set d_min_pitch = 0
set d_min_roll = 0
set f_pitch = 0
set f_roll = 0
set f_yaw = 0
PID Controller Settings
Set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set feedforward_transition = 0
set abs_control_gain = 0
set use_integrated_yaw = OFF
set iterm_relax_cutoff = 10
save

Une fois que vous avez trouvé le bon rapport P vs. D (Balance) vous pouvez réactiver les curseurs de
les curseurs de réglage du PID et les déplacer les déplacer (entre « Master Multiplier » et et « PD Balance ») pour vous rapprocher des chiffres les chiffres que vous avez définis manuellement. PAS toutes les classes de quads ne seront pas couvertes par l’étendue des curseurs. Donc si vous réglez un whoop, un toothpick ou un 10-inch, ils ne seront peut-être pas assez flexibles pour répondre à vos besoins. vos besoins. Les valeurs par défaut et l’étendue des curseurs de Betaflight ont été conçues pour un quad 6S – 5″.
Pendant que nous faisons les flips, les roulements, et les mouvements à mi-course (comme montré dans la vidéo ci-dessus), nous dessinons la réponse en escalier dans le contrôleur PID.
Réponse en escalier dans le contrôleur PID. C’est ainsi que l’on règle un contrôleur PID, point final ! Voir la
figure 5
pour voir l’impact des différents termes sur les performances des quads et la Figure 7 pour une description de ce qu’est une réponse en escalier « Critically damped ».
la figure 7 pour une description de ce à quoi ressemble une réponse échelonnée « amortie de façon critique ».
Figure 3 : Balance PD dans l’onglet PIDs
Figure 4 : bouton Activer les curseurs dans l’onglet PIDs
Une compréhension plus approfondie du réglage de la réponse en escalier :
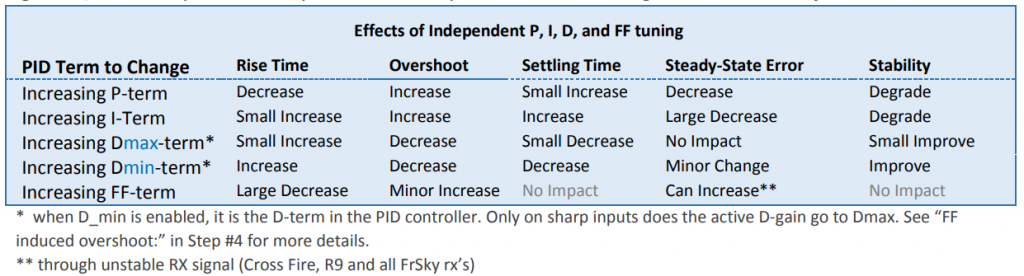
La figure 5 ci-dessous présente un résumé de l’effet de l’augmentation d’un terme lorsque les deux autres restent constants.
constants. Par exemple, si l’on regarde la ligne supérieure du tableau, en maintenant constants le terme I et le terme D et le terme P, on obtient les résultats suivants
Augmenter le terme P :
- Diminuer le temps de montée (vitesse de déplacement du quad en fonction des commandes du manche) ;
- Augmenter le dépassement (s’il est excessif) ;
- Augmenter légèrement le temps de stabilisation (s’il est excessif) ;
- Diminuer l’erreur en régime permanent (si optimal) ;
- Dégradation de la stabilité (si excessive).
LA CLÉ est d’avoir le bon équilibre entre les termes P et D pour obtenir une réponse en gradins « amortie de façon critique ».
(voir Figure 7). Le collage CLI de l’étape 2 ci-dessus nous aide à isoler les gains P et D pour trouver l’équilibre parfait !
Effets des réglages indépendants de P, I, D et FF
Figure 5 : Effet des changements de PID (source : http://eprints.gla.ac.uk/3815/1/IEEE_CS_PID_01580152.pdf)
La figure 7 décrit les termes ci-dessus. Pendant que nous effectuons des flips et des rolls, nous
nous changeons la « commande » (ce que nous appelons le point de consigne dans le monde du quad).
[dans le monde des quads), ce qui fait réagir la boucle PID et nous permet de voir comment elle gère le changement (la réponse au changement progressif).
le changement (la réponse au changement progressif). Nous voulons faire cela avec des mouvements à pleine
Nous voulons faire cela avec des mouvements à pleine vitesse et à demi-vitesse pour voir comment il gère ces deux choses pour optimiser le réglage.
l’accord.
Encore une fois, la pâte CLI nous aide à isoler les termes P et D (désactive FF et et en éliminant le terme I), ce qui nous permet d’ajuster le terme P pour déterminer le rapport P/D optimal.
l’équilibre P/D optimal (rapport), en recherchant la réponse PID « Critically Damped ». Cela signifie atteindre l’équilibre entre P et D le plus élevé possible, mais sans dépasser !
Figure 7 : Diagramme de réponse en escalier.
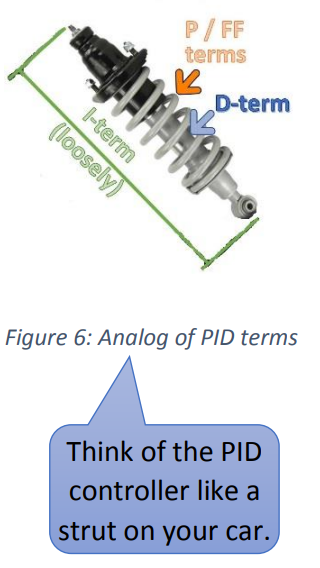
Figure 6 : Analogie des termes PID
Dans cet exemple, la « Commande » passe de 0 à 110% au temps zéro. La boucle PID réagit alors pour déplacer la machine dans notre cas le quad – à la nouvelle nouvelle valeur. La ligne de commande est notre bâton. Les lignes rouge, verte et jaune sont différents gyroscope (mouvement du quad) réponses du gyroscope (mouvement du quad) basées sur différents différents.
Vous voulez un réglage qui produit un
« mouvement du quadruple « amorti de façon critique
(mesuré par le retour du gyroscope
à la boucle PID).
L’objectif PID
Réponse
Pensez au contrôleur PID
comme une
jambe de force sur votre voiture.
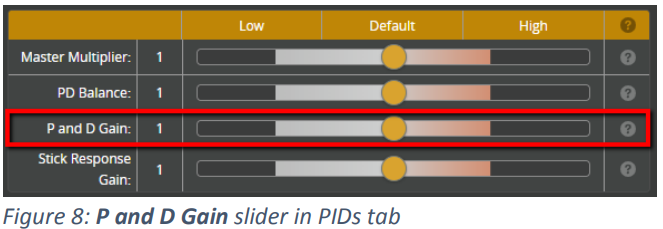
Étape 3 – Régler le gain « PD Gain » :
Une fois que l’équilibre P/D de votre installation a été déterminé, nous ne voulons JAMAIS FAIRE QUELQUE CHOSE POUR LE MODIFIER.
CELA, lorsque nous augmentons les gains ou réintroduisons les paramètres avancés du contrôleur PID (FF, D_min, etc…). Le site
Les curseurs PID sont construits avec ce principe fondamental à l’esprit et sont là pour aider à accélérer les choses.
fondamentaux et sont là pour aider à accélérer les choses. Avec
Ceci étant compris, cette étape consiste à augmenter les gains P et D ENSEMBLE afin d’obtenir une meilleure gestion du lavage des hélices et un suivi plus proche du manche.
pour obtenir une meilleure gestion du lavage des hélices et un suivi plus proche des
(point de consigne).
« Balance P/D » = gain P ÷ gain D.
Par exemple 60 (gain P) / 35 (gain D) = 1,71 (équilibre P/D)
Dans l’exemple ci-dessus, nous avons un rapport P/D Balance de 1,71. Par conséquent, si vous augmentez le gain D de 35 à 40,
vous devez augmenter le gain P de 60 à 68 (40 (nouveau gain D) x 1,71 = 68 (nouveau gain P)). Si vous utilisez le curseur P et D Gain
pour augmenter les termes, il maintient automatiquement la balance PD.
Faites des mouvements induisant un lavage d’étai (virages à 180° ou mouvements en split-S). Augmentez vos gains P et D pour réduire le
le lavage d’hélice. Au fur et à mesure que vous augmentez les gains P et D, vous arriverez à un point où les gains D plus élevés pourraient commencer à causer la chaleur du moteur ou des vibrations.
commencer à faire chauffer le moteur ou à provoquer des vibrations lors d’un vol vers l’avant (typiquement, des gains de 40 à 60 sur un 4s 5-inch ou de 30 à 40 sur un 6s 5-inch).
OU 30 à 40 sur un 6s 5-inch). De même, vous atteindrez un point où le lavage de l’hélice ne s’améliorera pas. Ce point est
Ce point est appelé « saturation du moteur » et est dû aux limitations mécaniques du moteur et de l’hélice. Vous pouvez le constater en vol
Vous pouvez vous en rendre compte en vol en constatant que les choses ne s’améliorent pas ou en regardant les traces de la commande du moteur dans le journal de bord de la boîte noire (elles atteignent 100% pendant 1 ou 2 ms).
100% pendant 1 ou 2ms). C’EST LE POINT SUR LEQUEL VOUS VOULEZ VOUS SITUER pour obtenir le meilleur réglage possible pour votre quad.
configuration mécanique spécifique. La SEULE façon d’améliorer la gestion du lavage de l’hélice à partir de ce point est de faire des changements mécaniques.
des changements mécaniques. Le moyen le moins cher est de trouver les meilleurs accessoires (les plus légers) pour correspondre à vos moteurs (ni trop ni trop peu), à la configuration que vous souhaitez.
La méthode la plus économique est de trouver les meilleures hélices (les plus légères) pour correspondre à vos moteurs (pas trop ou pas trop étagés), à votre courbe de réponse/feeling et à vos préférences en matière de durabilité. Donc si vous ne pouvez pas vous débarrasser
Donc si vous ne pouvez pas vous débarrasser de ce dernier gros lavage d’hélice à votre goût et que vous avez suivi ces pratiques à la lettre, c’est une limitation mécanique, pas le firmware.
c’est une limitation mécanique, pas le firmware.
Step #4 – Tune FeedForward (“FF”):
L’étape 4 est UNIQUEMENT importante si vous voulez améliorer la réactivité du manche (typiquement pour la course). Peut-être que
les pilotes de freestyle préfèrent FF = 0 pour une sensation plus douce.
Une fois que vous avez la force de gain de P et de D jusqu’à un point
point où vous obtenez la saturation du moteur lorsque
moteur en essayant d’induire un lavage d’hélice, vous pouvez encore pousser le
PID avec les fonctions avancées du contrôleur PID de Betaflight.
avancées du contrôleur PID de Betaflight. La fonction FeedForward (« FF ») va
fournira une poussée supplémentaire (en plus du P-term) pour
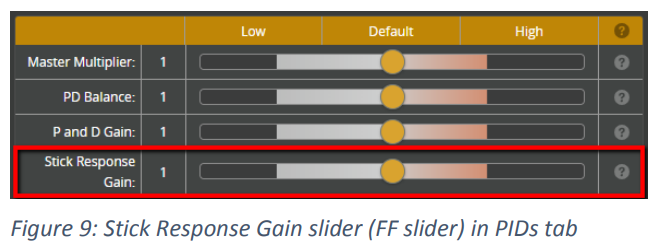
pour faire bouger le quad pour des commandes de manche précises. Les FF-termes sont basés sur la vitesse des mouvements de votre stick ; comme
l’accélérateur de la souris sur votre PC ou Mac. Le FF est similaire à un D-gain, sauf qu’il est basé sur les manches (et non sur le gyroscope comme le D-term).
gyro comme le D-term) et pousse le quad (au lieu d’amortir comme le D-term). Le FF est surtout une question de sensation,
donc augmentez comme vous le souhaitez (ou pas) pour obtenir la sensation désirée.
N’AYEZ PAS PEUR D’UTILISER DES GAINS DE FF ÉLEVÉS (300+) ! D’après mon expérience, un quad 4S – 650g – 5″ peut avoir besoin de gains FF aussi élevés que 300 pour que le gyroscope suive complètement le point de consigne pour des taux qui atteignent 1020 degrés/seconde.
Pour un guide vidéo sur cette étape, voir :
Principes de réglage du PID :
Étape 4 –
Réglage du FeedForward et de D_min pour suivre le point de consigne.
Dépassement induit par la FF : Au fur et à mesure que vous augmentez les gains FF, le quad peut commencer à avoir un léger dépassement.
Ce problème est beaucoup moins important dans la version BF 4.1+ que dans les versions antérieures, car un code a été ajouté pour détecter et arrêter la poussée de la FF lorsqu’elle se produit.
détecter et arrêter la poussée du FF lorsqu’il voit qu’il est
l’approche de la cible. Cependant, si
Cependant, si vous avez des dépassements, la réactivation de D_min peut permettre
le dépassement par la poussée supplémentaire de FF.
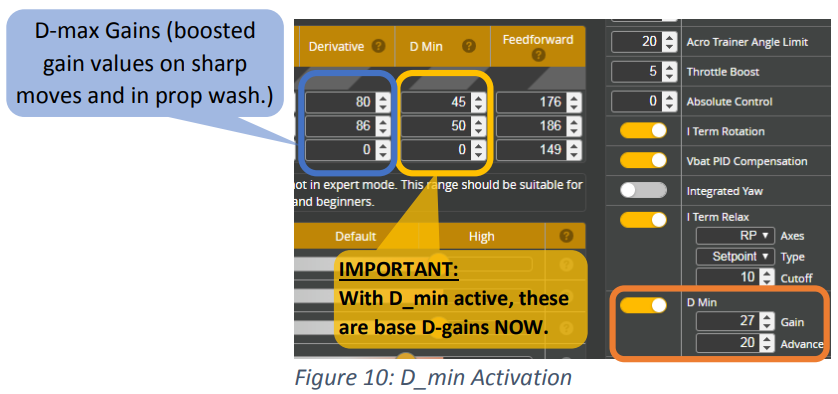
Une fois que D_min est activé, la colonne « D_min » s’ajoute à la grille des gains PID (Figure 10).
grille des gains PID (Figure 10). La colonne D_min est maintenant
vos gains D de base en vol normal avant ! Le quad
passera la plupart de son temps à voler à la valeur D_min.
La colonne « Derivative » représente les gains D amplifiés en cas de forte sollicitation du manche et pendant le lavage de l’hélice (alias « D_max »).
Un réglage typique de D_max qui permet de résoudre tout dépassement de FF est approximativement égal à vos gains P. Si
vous utilisez les curseurs, ils maintiennent automatiquement un rapport approprié.
Une meilleure compréhension de D_min :
Une fois que vous avez activé D_min, le quad volera avec D = D_min. Si le quad a besoin d’un gain de D plus important en raison de mouvements brusques, du lavage des hélices, etc.
Si le quad a besoin d’un gain de D plus important en raison de mouvements brusques, du lavage de l’hélice, etc.
mouvement / erreur induite. D_min augmente également les gains en D actifs lors de la détection du lavage d’hélice.
Vous pouvez augmenter la valeur de « D_min Gain » (représentée par « 27 » sur la figure 10) pour accroître la sensibilité de la détection du lavage d’hélice.
La valeur par défaut est 27, mais vous pouvez l’augmenter jusqu’à 50 pour que D_min augmente les gains D actifs plus tôt et les maintienne plus longtemps.
plus longtemps. Cependant, cela augmentera le temps de montée pour les mouvements de manche, car le gain D actif sera augmenté plus tôt dans les mouvements de manche brusques.
dans les coups de bâton. Consultez les vidéos ci-dessous pour en savoir plus sur la fonction D_min :
Détails de D_min et utilisation pour les rigs bruyants afin de réduire le filtrage : https://youtu.be/n8iwIcJSuWs
D_min comme « D_Boost » pour un réglage haute performance (ce que nous voulons) : https://youtu.be/RtsQwGVTHg4
Figure 9 : Curseur de gain de réponse du manche (curseur FF) dans l’onglet PIDs
Figure 10 : Activation de D_min
IMPORTANT :
Lorsque D_min est activé, il s’agit
sont les gains D de base MAINTENANT.
Gains D-max (valeurs de gain
valeurs de gain sur les mouvements
mouvements brusques et en cas de frottement des hélices)
Une fois que vous avez terminé, vous devriez avoir un réglage où le Gyro
suit complètement les sticks (la sensation la plus DIRECTE possible) et
combat le lavage d’hélice, le vent, l’oscillation, les bobines, etc… jusqu’aux limites mécaniques de votre quad.
jusqu’aux limites mécaniques de votre quad.
Étape 5 –
Réglage du lacet : le lacet est un axe très lent à répondre aux commandes du manche (Setpoint), comparé au roulis ou au tangage.
par rapport au roulis ou au tangage. La plus grande partie de l’influence du lacet est due à l’inertie des moteurs et des hélices (2 moteurs accélèrent et 2 ralentissent).
moteurs accélèrent et 2 ralentissent). Par conséquent, il n’y a généralement pas de dépassement du point de consigne et donc les gains D en BF pour le lacet sont par défaut à 0.
pour le lacet sont par défaut à 0, ce qui annule l’opposition du terme D aux gains P sur le lacet (mais c’est un gain que vous pouvez ajuster si vous le souhaitez).
souhaité). Pour augmenter la poussée initiale du lacet, comme pour les autres axes, augmentez les gains P. Si vous ajoutez le Yaw Dgain, il s’opposera à cette poussée nécessitant des gains P plus élevés. Cela donnera à l’orientation un saut initial pour faire bouger les choses.
mouvement. Cependant, étant donné sa lenteur à réagir, le lacet nécessite un gain I beaucoup plus élevé pour le maintenir sur le point de consigne.
Comme pour le réglage du terme I à l’étape 6, il est préférable de régler le lacet par le biais de la boîte noire et en regardant dans quelle mesure la lecture du gyroscope de l’axe de lacet suit le point de consigne.
de l’axe de lacet suit le point de consigne de l’axe de lacet lorsque vous effectuez des mouvements de lacet brusques. Ensuite, appliquez les principes
de l’étape 2 à l’axe de lacet. Je trouve que vous avez besoin d’un gain P et d’un gain I ELEVES pour le lacet (P = 80 / 90 et gains I par défaut).
Pour un guide vidéo sur cette étape, voir : Principes de réglage du PID : Étape 5 – Réglage de l’axe de lacet
Notez que dans BF 4.0+, les I-gains de l’axe de lacet sont multipliés par 2.5 dans le code pour donner un contrôle Igain encore plus élevé sur l’axe de lacet. Ainsi, dans les versions antérieures de BF (3.5 et inférieures), les gains I du lacet sont beaucoup trop faibles.
trop faibles.
Fonctionnalité de lacet intégrée dans BF 4.0 : Si elle est activée, elle modifie les conseils ci-dessus. Notez que le
Notez que le collage de l’étape 2 désactive le lacet intégré pour le moment, jusqu’à ce que cette nouvelle approche de réglage du lacet puisse être validée (avec l’aide d’un expert).
Etape 6
Étape 6 – Réglage de l’i-Term : Avec l’ajout de la fonction i-Term Relax dans BF, vous pouvez faire fonctionner de très hauts
gains I très élevés sans ramifications négatives. La meilleure façon de régler le I-term est de le sentir ou d’utiliser la boîte noire. Des gains en I plus élevés permettront au quad de suivre le point de consigne avec plus de précision dans les virages serrés. Votre quad sera aussi un peu plus
un peu plus rigide pour entrer dans les mouvements brusques. En fin de compte, ce n’est pas un terme/gain si délicat. Ainsi, la meilleure
Donc, la meilleure façon de procéder est de régler tout le reste, puis d’obtenir un journal de la boîte arrière et de voir si le quad suit bien le point de consigne dans les mouvements et les virages.
Le quad suit le point de consigne en effectuant des mouvements/tours de balayage.
Si la trace du gyroscope semble se situer au-dessus ou au-dessous du point de consigne pendant une période prolongée, vous avez besoin d’un gain I plus élevé.
gains I plus élevés. Si la courbe du gyroscope rebondit très, très lentement au-dessus et au-dessous de la courbe du point de consigne, cela signifie que le terme I est trop élevé (c’est-à-dire qu’il n’y a pas d’écart entre les deux).
signifie que votre I-term est trop élevé (ceci est très rare et nécessite des gains I de 100+ dans la plupart des cas – cherchez un trèfle à 4 feuilles ce jour-là).
un trèfle à 4 feuilles ce jour-là et jouez au PowerBall). Dans la plupart des cas, les quads se situent dans la large fenêtre pour des gains d’I décents établie par la Detective.
Dans la plupart des cas, les quads se situent à l’intérieur de la large fenêtre de gains I décents définie par les valeurs par défaut, de sorte que l’on se concentre généralement peu sur le réglage I à long terme. Mais généralement les coureurs
Mais en général, les pilotes veulent des gains I plus élevés pour un meilleur suivi dans les virages larges et serrés.
et voyez comment vous vous sentez sur la piste. Si vous aimez une sensation plus libre pour le style libre, essayez des gains I plus bas.
et peut-être même FF = 0 pour des séquences HD plus fluides.
DÉFINITIONS :
« Overshoot » : c’est quand vous induisez un changement du taux de rotation désiré en roulis, tangage ou lacet et que le quad se déplace pour correspondre à votre nouvelle position commandée.
se déplace pour correspondre à votre nouvelle vitesse commandée (en degrés/seconde) mais dépasse la cible. Ce
également connu sous le nom de « rebond » lorsqu’il s’agit d’un mouvement vu dans le flux FPV, la LDV ou dans les journaux de la boîte noire à la fin du vol.
dans les journaux de la boîte noire à la fin d’un flip ou d’un roll. Le terme « rebond » signifie donc que le quad
le quad dépasse le changement de mouvement commandé et doit donc « rebondir » au taux commandé.
vitesse commandée. En regardant la figure 7 ci-dessus, le dépassement est un signe d’un contrôleur PID « sous amorti ».
un contrôleur PID « sous-amorcé » ; ce n’est pas un bon réglage PID.
« Rebond : c’est le quad qui fait un petit volet (ou secousse) à la fin d’un saut périlleux ou d’un roulis. Vous pouvez voir
bounceback dans votre flux FPV, vos séquences HD ou le journal de la boîte noire. C’est généralement le quad qui va
Il s’agit généralement du quad qui dépasse la vitesse de rotation ou de basculement souhaitée (point de consigne) et qui rebondit jusqu’au point de consigne. En regardant la
Figure 7 ci-dessus, le rebond est un signe d’un contrôleur PID « Underdamped » ; pas un bon réglage PID.
pas un bon réglage PID.
Si le rebond est rapide :
Si le quadruple semble dépasser le point de consigne et rebondir vers le point de consigne, cela signifie que
votre balance P/D est trop élevée. Augmentez le terme D ou réduisez le terme P.
Si le quadruple semble s’arrêter avant le point de consigne et rebondir davantage pour atteindre le point de consigne (rare), cela signifie que votre équilibre P/D est trop élevé.
point de consigne (rare), cela signifie que l’équilibre P/D est trop faible (voir Figure 7 – Condition de suramortissement).
). Réduisez le terme D ou augmentez le terme P.
Si le rebond est lent :
Il s’agit d’un enroulement du terme I qui entraîne le quadrant au-delà (ou avant) du point de consigne.
Il s’ajuste ensuite lentement en arrière (ou en avant) vers le point de consigne. CEPENDANT, avec
le collage CLI de l’étape 2 ci-dessus, le réglage de la fonction « i-Term Relax » à une valeur de coupure de « 10 » empêchera l’accumulation de l’échéance. empêchera l’enroulement de l’i-Term d’entraîner le quadrant au-delà du point de consigne. Pour en savoir plus sur la fonction i-Term Relax, voir :
« Setpoint » : c’est ce que vous demandez au quad de faire. Par exemple, lorsque vous effectuez un roulis prononcé, le point de consigne
passe d’un taux de rotation de 0 degré/seconde au taux de rotation maximal que vous avez défini dans l’onglet Rates.
dans l’onglet Rates. Nous indiquons au quad les taux de roulis, de tangage et de lacet avec nos manches TX
(le reste n’est qu’une quantité de gaz) et la boucle PID contrôle le quad pour qu’il atteigne et maintienne les taux commandés (Setup).
et le maintien des taux commandés (Setpoint). Vous pouvez voir à quel point vous vous rapprochez du
Setpoint par l’expérience (beaucoup) ou plus simplement en regardant le log d’une boîte noire.
log.