RPM FILTER ou DSHOT BIDIRECTIONNEL
Le RPM-Filter est arrivé avec le version 4 de BETAFLIGHT, sa configuration est devenue super simple depuis Betaflight 4.1, le plus dur est probablement de mettre à jour votre FC et votre ESC 🙂 Si vous trouvez le guide officiel trop difficile à avaler, vous trouverez peut-être mon tutoriel sur ce RPM filter utile.
(´◉◞౪◟◉)
RPM Filter quesako
Comme tous les filtres, le RPM-Filter sous Betaflight est conçu pour réduire le bruit au niveau du gyro, et issu des moteurs en particulier. Il est important de régler correctement ses filtres afin d’avoir le meilleur resenti possible en vol.
Selon de nombreux pilotes, le filtre RPM est de loin le meilleur filtrage de Betaflight, et vous devriez certainement l’essayer si vous ne l’avez pas déjà fait…..
ʕ•ᴥ•ʔ
Qu’est-ce que le filtre RPM?
Le filtre notch (coupe bande) est très efficace pour diminuer le bruit du quad, il y a moins de latence de traitement qu’un filtre passe-bas pour la même quantité d’atténuation.
Quelques info sur les filtres ici —>Betaflight Filter 101 .
Le défi vient du suivi de la fréquence de crête du bruit. Le filtre dynamique fait cela assez bien, mais il ne suit qu’une seule fréquence. Les moteurs d’un drone peuvent tous tourner à différents régimes (rpm / tour par mn), ce qui fait du bruit à différentes fréquences. D’autre part, le filtrage dynamique demande des ressources et augmente dons la latence au niveau du traitement du signal par le contrôleur de vol.
Le filtre RPM est essentiellement une collection de filtres coupe-bande, ciblant précisément la fréquence du bruit et ses harmoniques à l’aide d’information provenant des moteurs. Le filtrage est obtenu non plus en fonction du niveau du Throttle, mais directement à l’aide du régime moteur de l’ESC via le DShot bidirectionnel.
Flash le dernier micrologiciel BLHeli
N’OUBLIEZ PAS D’ENLEVEZ TOUTES LES HÉLICES AVANT DE COMMENCER, BLA BLA BLA
Mettez à jour votre BLHeli_32 ESC vers la version 32.7 ou plus récente afin d’utiliser le «DShot bidirectionnel», qui est une fonctionnalité nécessaire pour le filtre RPM. ( Instructions pour mettre à jour BLHeli_32 )
Vous pouvez également faire des filtres RPM sur BLHeli_S ESC, il vous suffit de flasher un firmware spécial. Ce tutoriel explique comment configurer le filtre RPM sur BLHeli_S ESC .
Comment configurer le filtre RPM dans Betaflight
Mettez à jour votre FC vers Betaflight 4.1 ou plus récent (Comment flasher Betaflight)
Utilisez une boucle de 4KHz.
Avec un temps de boucle plus rapide (c’est-à-dire 8K), vous pourriez avoir de la nervosité, 4K est une option plus sûre et la plupart des gens ne remarqueront probablement pas la différence de toute façon.
Fréquence du gyroscope verrouillée
Alors que FalcoX et EmuFlight fanfaronne le 32kHz, BetaFlight tend à contenir la course à la fréquence du gyroscope. En effet, depuis la version 4.2, BetaFlight a bloqué la fréquence du gyro à la vitesse native de ce dernier (en fonction du materiel). Pour faire simple, cela permet de conserver un signal le plus précis possible en évitant notamment le phénomène d’aliasing. Du coup, le RPM filter deviendrait encore plus performants ! Pour suivre l’avancement des travaux concernant le filtrage dans BETAFLIGHT c’est par là : >>> commit.
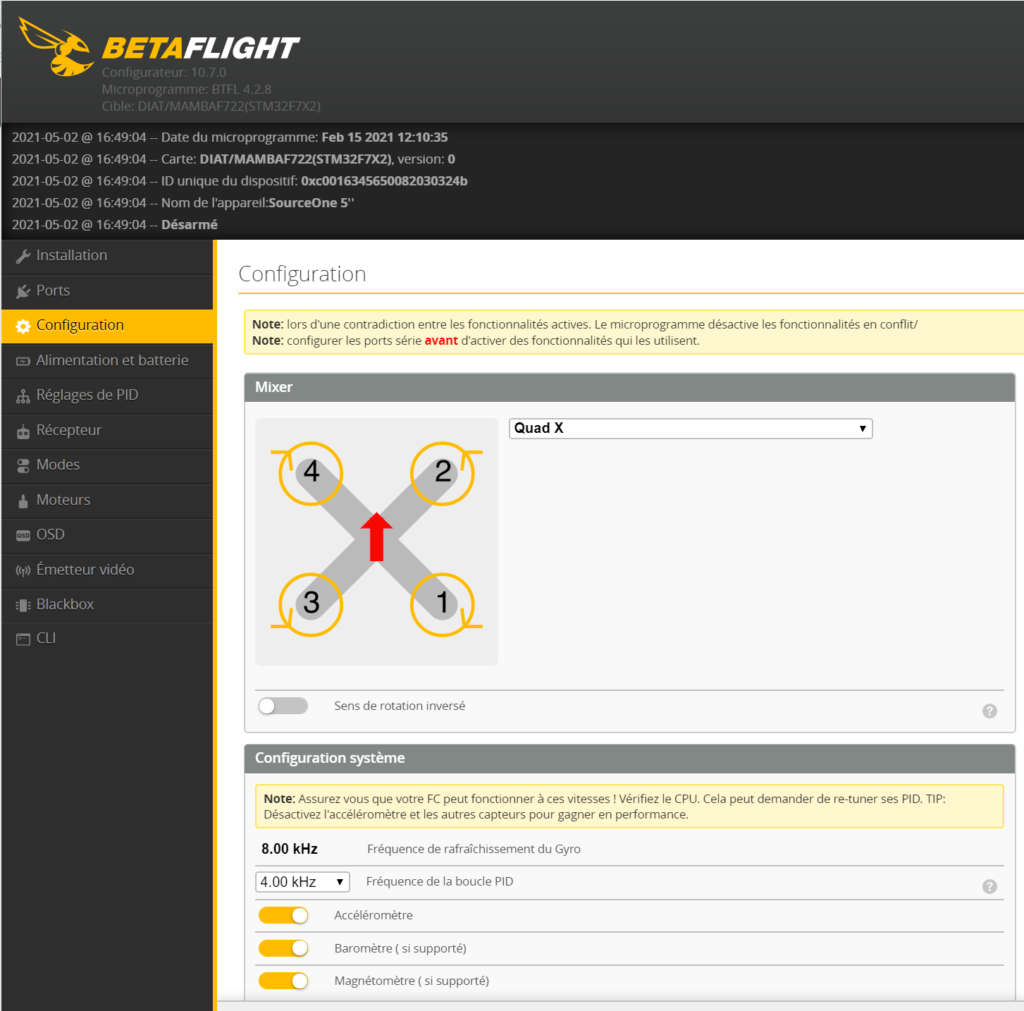
Pour le looptime je vais utiliser du 4Khz, en DShot300, si vous devez utiliser le DShot600 alors il vous fa une boucle de 8Khz.
Pour les utilisateurs BLHeli_S, utilisez une configuration différente en fonction du processeur ESC
- Utilisez le looptime 4K et le DShot300 si vous avez des ESC de type «H» (BB2)
- Utilisez 2K looptime et DShot150 si vous avez des ESC de type «L» (BB1)
Activez « Bidirectional DShot » et définissez les pôles du moteur .
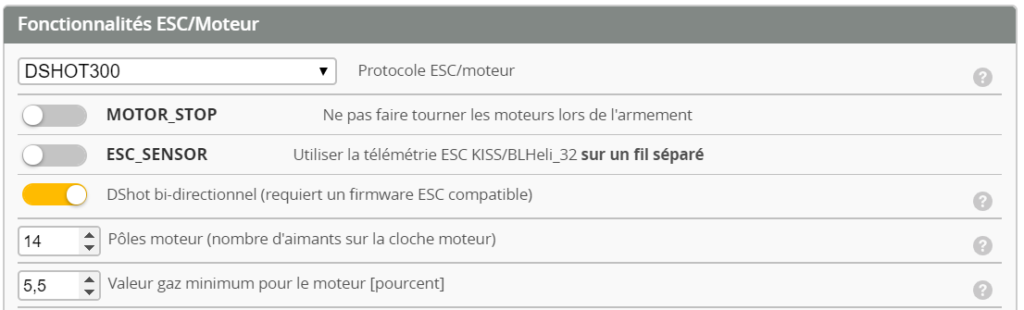
Comptez simplement le nombre d’aimants que vous avez dans la cloche du moteur, c’est le nombre que vous devez entrer dans les pôles du moteur . Si vous entrez le mauvais numéro, le filtrage ne fonctionnera pas correctement (ne signale pas le bon RPM). En règle générale:
- 14 pôles dans les moteurs 22XX, 23XX, 24XX
- 12 pôles dans les moteurs 08XX, 11XX, 12XX, 13XX, 14XX, 16XX
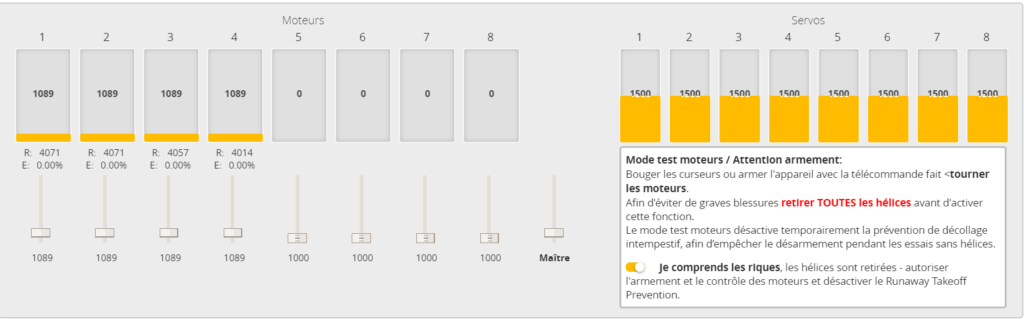
Maintenant, allez dans l’onglet moteurs, en haut des curseurs, vous pourriez voir DShot Error at «E: 100%».
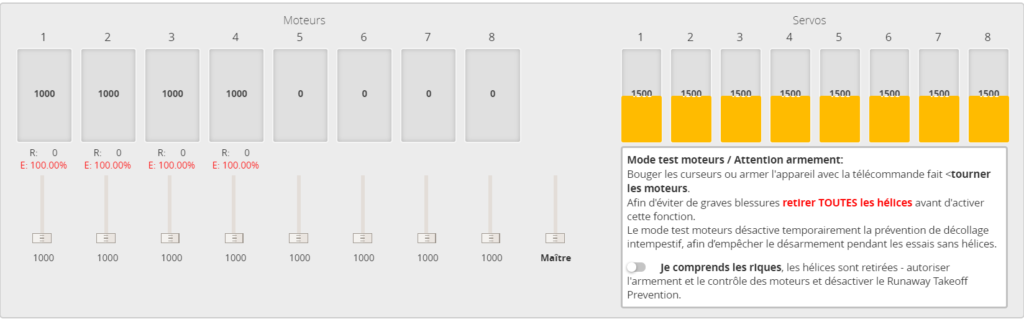
Dès que vous branchez la batterie, elles devraient toutes passer à 0%. S’ils ne le font pas, quelque chose ne va pas. Vous voudrez peut-être utiliser un temps de boucle plus lent si vous exécutez 8K / 8K.
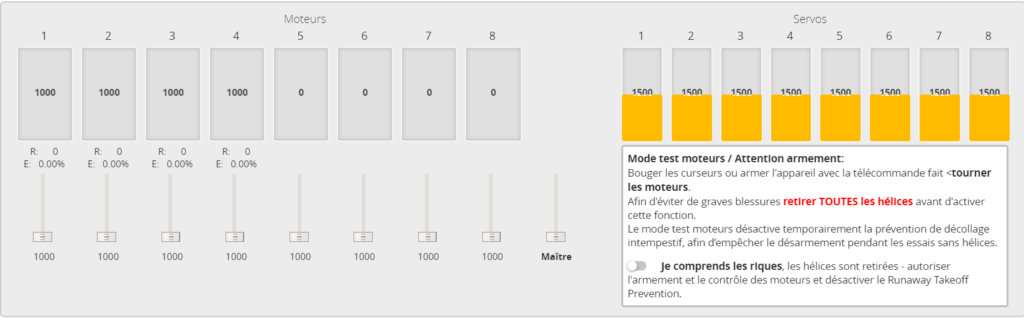
Vous pouvez maintenant faire tourner les moteurs avec les curseurs (appliquez juste un peu d’accélérateur), pour vous assurer qu’ils fonctionnent correctement.
Allez maintenant à la page de réglage PID, sous Filter Setting, activez « Gyro RPM Filter ». Laissez simplement les deux paramètres par défaut.
Par défaut, le filtre RPM est réglé pour cibler 3 harmoniques pour chaque moteur (4 moteurs), sur chaque axe (tangage, roulis, lacet), il vous donne donc un total de 36 filtres coupe-bande!
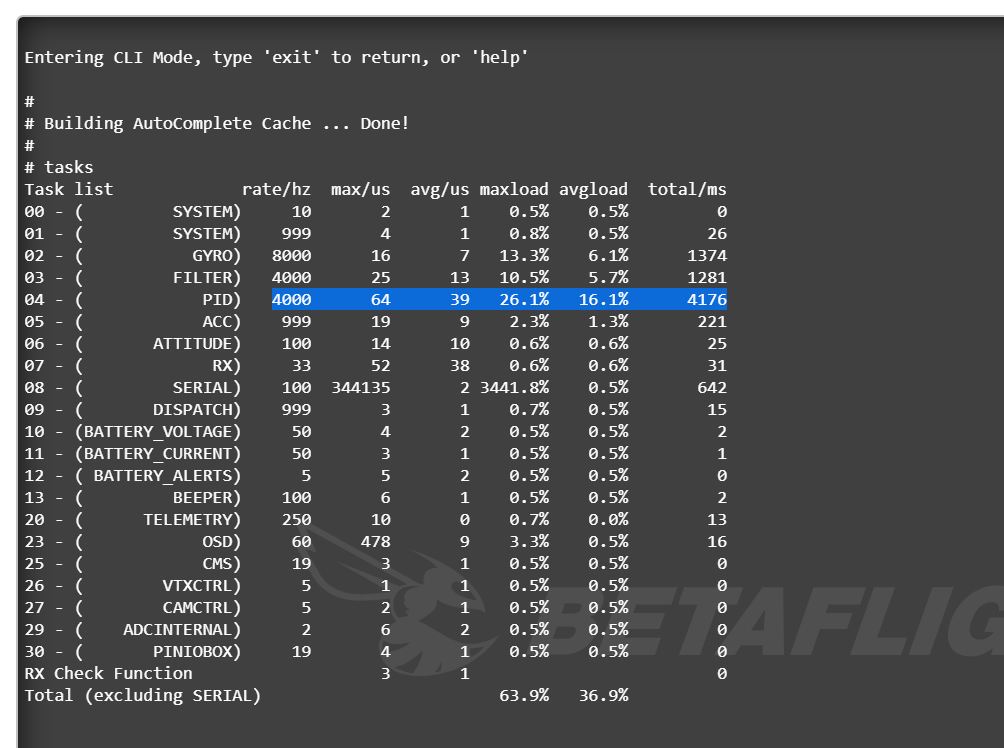
Après le redémarrage de votre contrôleur de vol, accédez à la CLI et entrez
tasks
Vérifiez si la valeur de « Gyro / PID rate / hz » est proche de votre temps de boucle. Par exemple, pour 4K / 4K, il devrait lire environ 4000. Il n’est pas nécessaire que ce soit exactement la même chose, mais la différence doit être inférieure à 1%, sinon vous devriez réduire le temps de boucle jusqu’à ce qu’il le soit. (comme recommandé par les développeurs Betaflight)
Maintenant, sortez et pilotez votre quad, il devrait vous sentir plutôt bien. Mais nous n’avons pas encore tout à fait terminé, vous pouvez toujours modifier les paramètres de filtrage pour en tirer plus de performances.
ノಠ益ಠ)ノ彡┻━┻
Suppression du filtrage par défaut
Le simple fait d’ajouter des filtres RPM rendra certainement votre quad plus fluide et les moteurs plus froids, mais nous devrions profiter de l’excellent rejet de bruit du filtre RPM et essayer de minimiser le délai de filtrage par défaut.
C’est en fait la partie qui rend votre quad si bon sans propwash 🙂
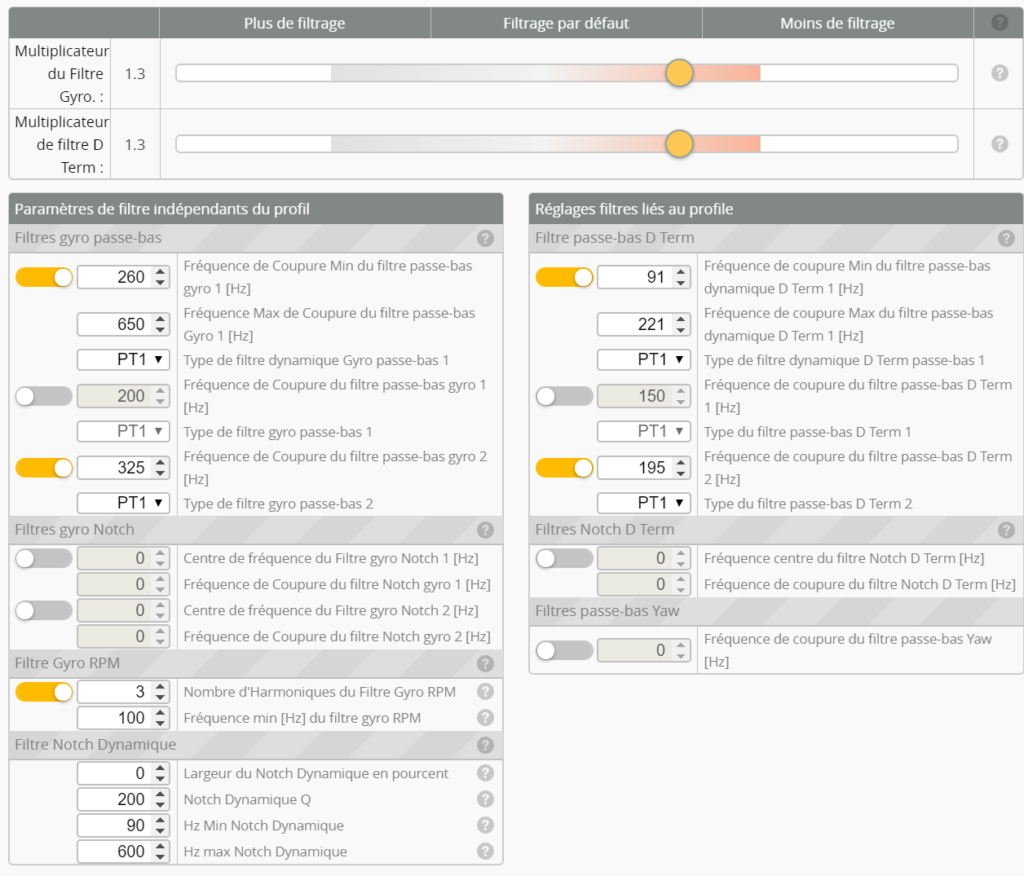
Sous Filtre Notch Dynamique :
- Laissez la plage de filtrage à Medium, mais si les moteurs sont froids, vous pouvez essayer de la changer sur LOW
- Remplacez le pourcentage de largeur par 0 (la définition de ce paramètre sur zéro supprimera l’un des deux filtres dynamiques et réduira la latence)
- Facteur Q à 200 voire 250 – pour un filtre plus étroit
- Réglez la fréquence Min à 90 car il y a moins de bruit à haute fréquence maintenant grâce au filtre RPM, et nous voulons nous concentrer sur une fréquence plus basse
Testez à nouveau votre quad, je suggère de le faire avec des hélices usagées car cela vous donnera des résultats plus objectifs.
Si les moteurs sont froids, cela signifie probablement que vous pouvez réduire davantage le filtrage. Mais cette fois nous allons utiliser les deux curseurs sur le dessus de l’onglet Filtre – Filtre Gyro Multiplicateur et multiplicateur de filtre D à long terme .
Vous n’avez pas à modifier les cases à cocher ou les nombres sous les curseurs. Ceux-ci s’ajustent d’eux-mêmes lorsque vous déplacez les curseurs vers la gauche et la droite.
Essayez de faire glisser les deux curseurs vers la droite pour moins de filtrage, juste un tout petit peu à chaque fois que vous testez le quad. Vérifiez la température du moteur et évaluez si vous pouvez réduire davantage le filtrage. Notez que même si les moteurs ne chauffent pas, sans un filtrage suffisant, votre quad peut en fait fonctionner moins bien, alors gardez cela à l’esprit, la température du moteur n’est pas la seule chose!
Pour obtenir plus de conseils de réglage, assurez-vous de lire le guide officiel Betaflight .
{-_-}
Recent Announcements BETAFLIGHT
- WARNING! – Avoid any unofficial beta BLHeli_S firmware versions from JazzMaverick after 16.73 as they are incompatible with RPM Filtering. The author made undesirable changes that reduce the rate at which RPM telemetry data is supplied. As a result the RPM filtering will not track the motor vibrations well, resulting in poor filtering performance and possibly hotter motors. The 16.73 version is the only recommended version that properly supports RPM filtering.
- Bidirectional DSHOT and RPM Filter for BLHeli_S escs. Free Version. Install the latest BLHeli Configurator and (choose firmware version 16.73) Get it here!
- Latest EA of a custom BF 4.1 Performance Edition for F3 FCs available. Get it here!
- JESC supports bidirectional DSHOT and RPM Filter on BLHeli_S escs. Free on L ESCs, Paid but VERY cheap and worth it on H ESCs! 48khz and 96khz PWM version available for testing Get it here!
- Bidirectional DSHOT now fully supported in the just released version 32.7.0 of blheli32. You can flash from configurator without downloading hex files manually.
–~~~=:>[XXXXXXXXX]>
Source: https://oscarliang.com/rpm-filter/
Ping : CONFIGURER VOTRE MOBLITE7 AVEC RPM-FILTER et BETAFLIGHT 4.2.8 – Domotics